Finishing Montecarlo Visual Loc solution
Overview
This week I finished updating the roof textures for the Montecarlo Visual Loc house and the solution for it. I also continued developing the Laser Mapping exercise.
Finishing Montecarlo Visual Loc solution
First I updated the textures of the roof one last time to make it even easier for the robot to locate itself
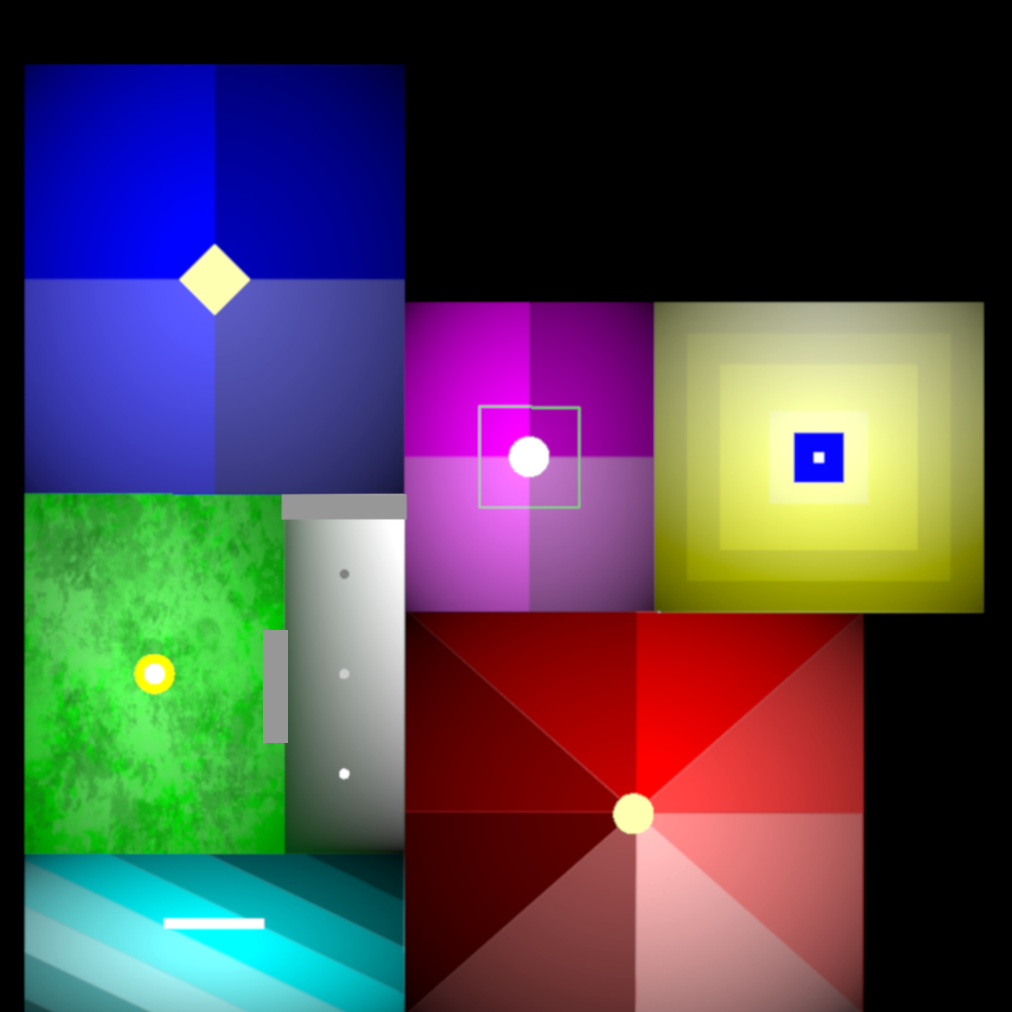
Then I updated the values for assigning weights to the particles even more and the result is a much more accurate solution for the exercise. The algorithm will reset after predicting the position of the robot up to 10 times.
Continuing the Laser Mapping exercise
Next I kept developing the Laser Mapping exercise. First I added the setUserMap function on GUI.py, this function accepts a numpy array as an argument that will serve as the map to show on the frontend that the user is making. The image has to be grayscale.
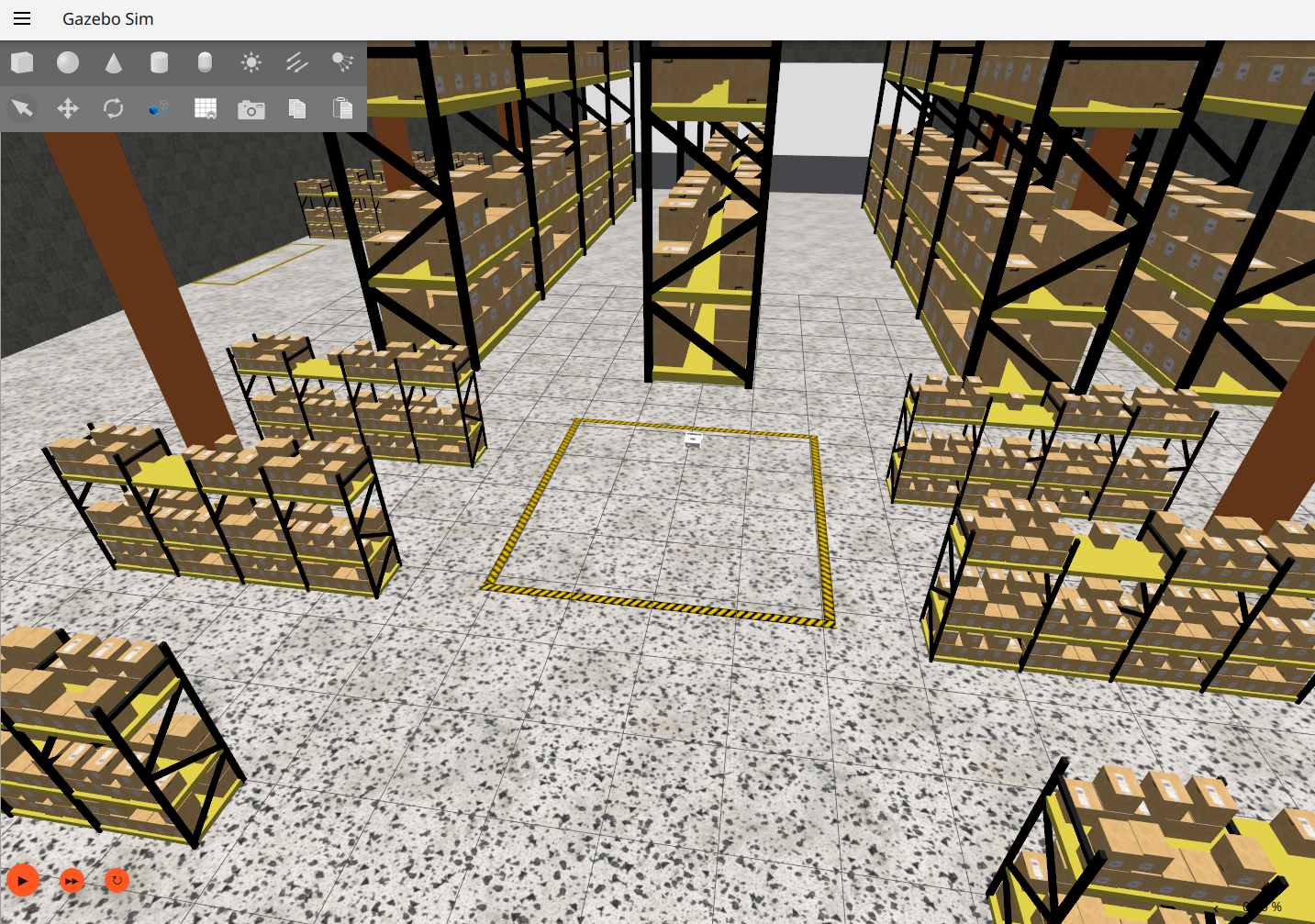
Then I searched for a bigger world than the one in marker visual loc since that one is too small for the mapping exercise. Searching for gazebo harmonic models in https://app.gazebosim.org/fuel/models I found a warehouse world that should be big enough for it.