Modifying Laser Mapping Solution 2
Overview
This week I modified the exploration algorithm the solution uses so it’s more effective.
New exploration algorithm
Previously we were using a pseudo-random algorithm to move the robot around the warehouse, which isn’t very effective, so I changed the movement of the robot so it can cover as much space as possible.
First I thought on implementing an algorithm that swipes the area from right to left and slowly goes up and then search for the nearest unknown pixel in the map and create a path to reach there and continue with the swipes. However after many attempts, this proved unreliable since there’s a lot of delay in the exercise and the algorithm to reach the nearest pixel could break pretty easily, so I opted for something simpler.
This new algorithm runs from left to right, then after it reaches a wall it moves up a bit and goes from right to left and so on, until it reaches the top, then it repeats the movements but this time from north to south/south to north and slowly advancing horizontally, then it switches between the horizontal swipes and the vertical ones indefinitely, this covers almost everything.
Here’s an example of the horizontal and then vertical swipes:
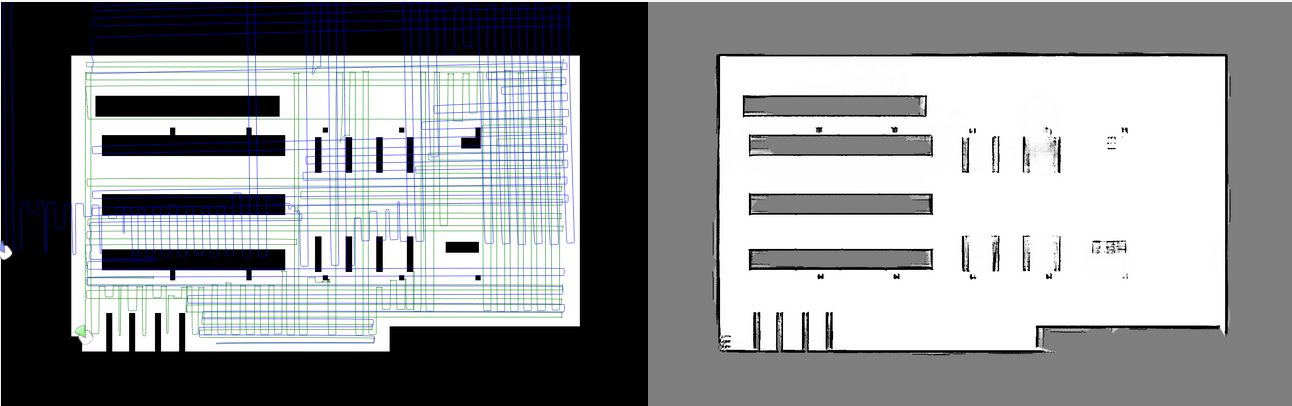
The green line is the real position, the blue one is the one from odom1, which we aren’t using in this case. It takes hours to cover all the warehouse so in all that time even the noise in odom1 can accumulate quite a lot.