
Week 11 Overview
During this eleventh week, I continued testing the RADI engine for the Unibotics platform.
First, I tested the ‘Follow Line’ exercise using its API functions with Nvidia GPU acceleration, and it worked correctly.
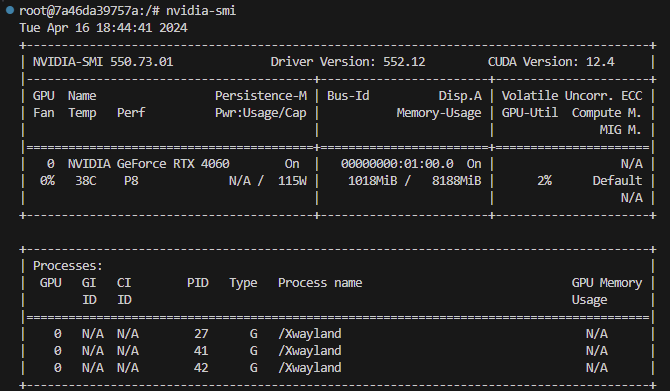
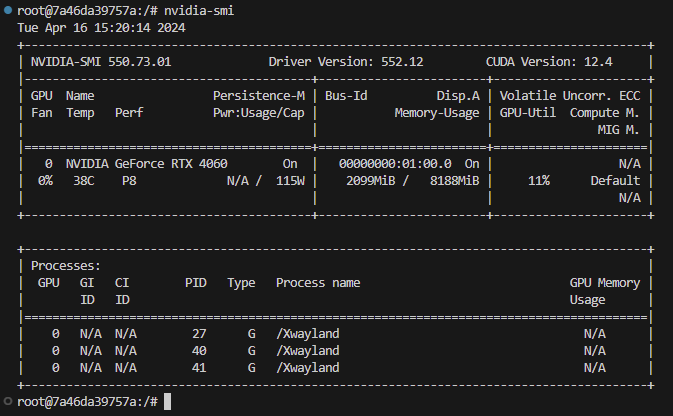
Additionally, I investigated the use of the GPU on Windows with WSL2 more deeply. I found that it is challenging to fully verify GPU usage within a Docker container on Windows. This is because Windows uses the WDDM model to handle everything related to the GPU, which blocks the visualization of per-process GPU usage with external tools from ‘Task Manager’ like ‘nvidia-smi’, only global usage can be seen.
Finally, the development team released a new beta version of RADI, 4.5.8, which included the complete migration of a new exercise ‘Montecarlo Laser Loc’. I proceeded to test the API functions to ensure everything worked correctly.