Week 17 Overview
During this seventeenth week, I continued testing the RADI engine for the Unibotics platform and started other assigned tasks.
First, the development team released a new version of RADI, version 4.5.13, which included some bug fixes and adjustments to the exercise APIs. I proceeded to test this new version to ensure everything was working correctly, and indeed, I did not detect any internal issues and everything functioned well.
Additionally, I was tasked with analyzing the optimization of RADI with Nvidia GPU acceleration and proposing possible ways to improve its usage. I reviewed the Docker container launch code and the dependencies installed within it. After some time, I found a potential optimization: by dumping the native display of the host operating system to the RADI Docker container during its launch, we could achieve greater GPU acceleration within the container.
docker run --rm -it --env="QT_X11_NO_MITSHM=1" --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" --gpus=all --device /dev/dri -p 7164:7164 -p 6080:6080 -p 1108:1108 -p 7163:7163 jderobot/robotics-academy:4.5.13
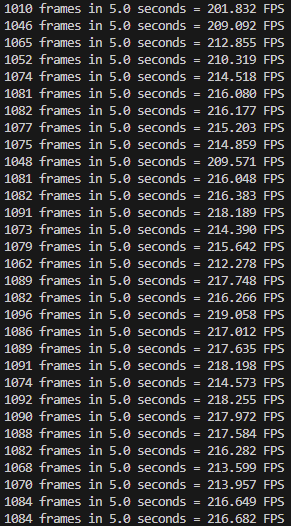
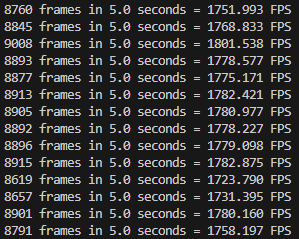
To verify this improvement, I used the ‘glxgears’ tool, which demonstrated an increase in Nvidia GPU acceleration.