Resumen Semana 17
En esta decimoséptima semana, continué con las pruebas del motor RADI de la plataforma Unibotics y empecé otras tareas encomendadas.
Para empezar, el equipo de desarrollo lanzó una nueva versión del RADI, la 4.5.13, en la cual se agregaban algunas correciones de bugs y algunos ajustes a las APIs de los ejercicios. He procedido a probar esta nueva versión para comporbar si todo funciona correctamente, que en este caso, no he detectado ningún fallo interno y todo funcionaba bien.
Por otro lado, me encomendaron en analizar la optimización del RADI con aceleración GPU Nvidia y si es posible proponer alguna forma de optimizar el uso de éste. He revisado el código de lanzamiento del contenedor Docker y las dependencias que instala dentro del mismo. Tiempo después, encontré una posible optimización que se podría ejecutar, que se trata que dumpeando el display nativo del sistema operativo host al contenedor Docker del RADI en su lanzamiento, se puede obtener una mayor aceleración GPU dentro del contenedor.
docker run --rm -it --env="QT_X11_NO_MITSHM=1" --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" --gpus=all --device /dev/dri -p 7164:7164 -p 6080:6080 -p 1108:1108 -p 7163:7163 jderobot/robotics-academy:4.5.13
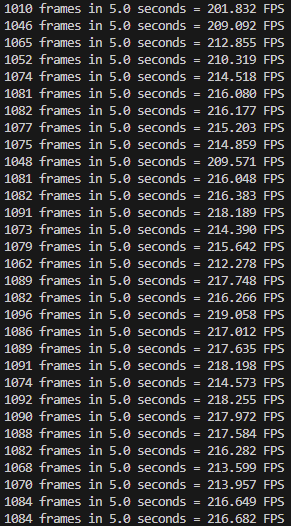
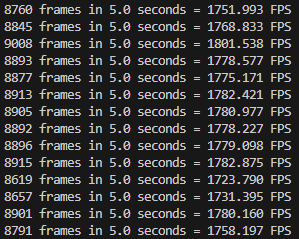
Entonces, usando la herramienta ‘glxgears’ se puede comprobar el aumento de la aceleración GPU Nvidia.