
Resumen Semana 18
En esta decimoctava semana, realicé las últimas tareas dentro de JdeRobot relacionado con el motor RADI de la plataforma Unibotics.
Para empezar, en relación a la optimización de la aceleración GPU Nvidia, un miembro del equipo de desarrollo descubrió un fallo dentro del RADI que se trata de que al ejecutar cualquier comando utilizando la GPU, no se ejecuta el comando con un error de que el diapositivo es inválido, como que no puede usar bien la GPU. Al principio, probé lo mismo en mi ordenador Windows donde los comandos funcionaban bien y en una primera conclusión mía era que como el miembro del equipo tiene un ordenador con GPU integrado Intel y GPU Nvidia, puede un problema cuando se utiliza dos GPUs.
Entonces, en una segunda prueba pero con mi ordenador Linux, me dí cuenta que ahí si me daba el error que comentaba el miembro del equipo. Probando con otro lanzamiento del RADI pero sin agregar la variable --device: /dev/dri, empezó a funcionar como en mi ordenador Windows, por lo que llegué a la conclusión que puede sea un fallo específico de Linux o que el uso de esa variable no esté bien implementado y esté dando problemas. Todo esto se lo he comunicado al equipo de desarrollo para que lo tengan en cuenta.
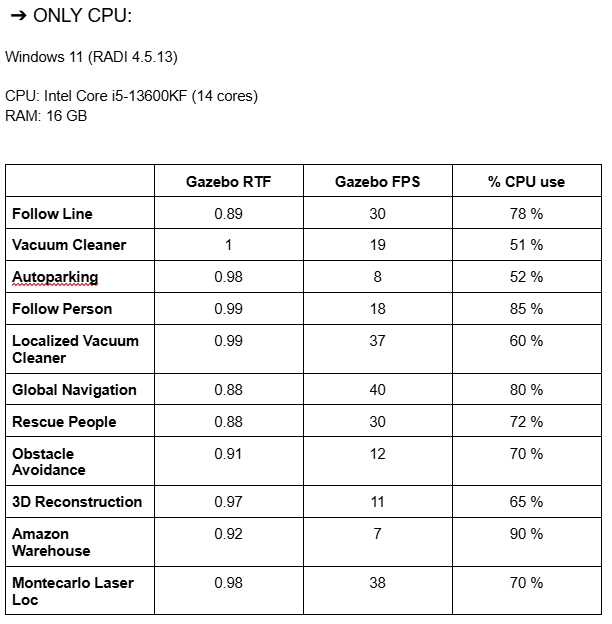
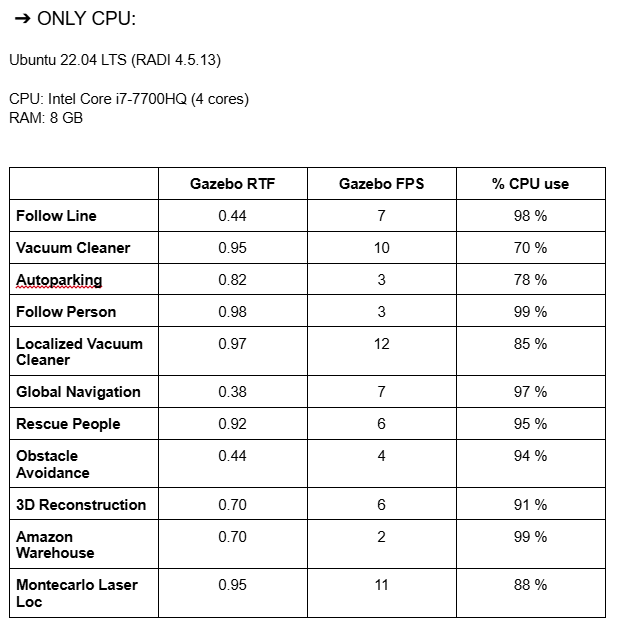
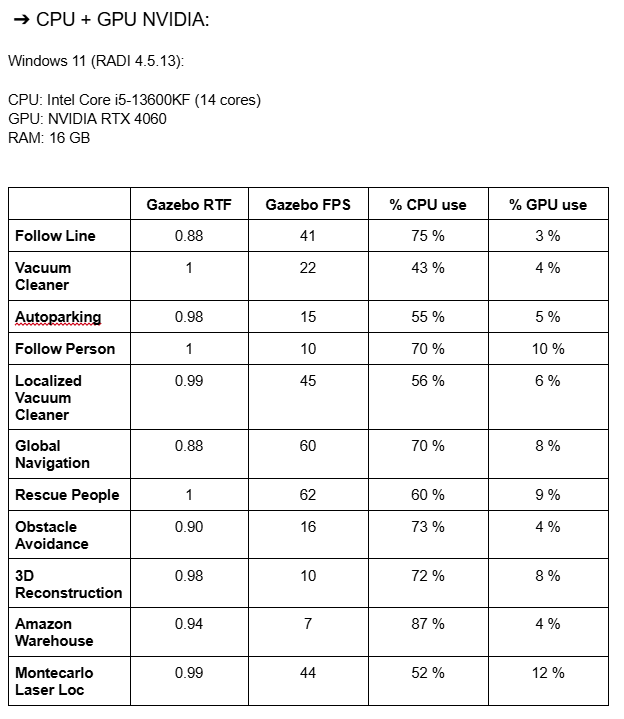
Por otro lado, me encomendaron la tarea de crear unas tablas donde contenga los valores del rendimiento y consumo del hardware de la ejecución de cada ejercicio dentro del RADI para mostrarlos dentro de la documentación de usuario para que los diferentes usuarios que utilicen el RADI, tenga en mano unos valores de referencia dependiendo del hardware que ellos dispongan.
Por lo tanto, he realizado tres tablas diferentes: uno con las caracteristicas de mi ordenador Windows con el RADI en modo sólo CPU, otro con mi ordenador Windows con el RADI en modo CPU + GPU y otro con mi ordenador Linux con el RADI en modo sólo CPU. Luego estas tablas las introduje en la documentación de usuario.
Por último, quiero agradecer a mi mentor y al equipo de desarrollo por haberme enseñado muchas cosas y haberme sentido cómodo durante todo el periodo que he estado en JdeRobot como practicante.