
Follow Line
GOAL
The goal of this exercise is to perform a PID reactive control capable of following the line painted on the racing circuit.


Had to program a Formula1 car in a race circuit to follow the red line in the middle of the road. You can find all the information about this exercise in JdeRobot Academy
IMAGE PROCESSING
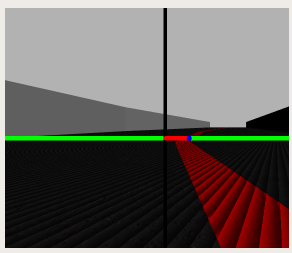
For the image processing i have used OpenCV. I have searched the center point of the red line at a certain height of the image to work with in in the controller. I have drawn a green line at the same height to see the movement of the point more clearly and a vertical line in the center of the image that determines the place where the point should be. To show the error in the image, I have painted a red line on the green.

CONTROLLER
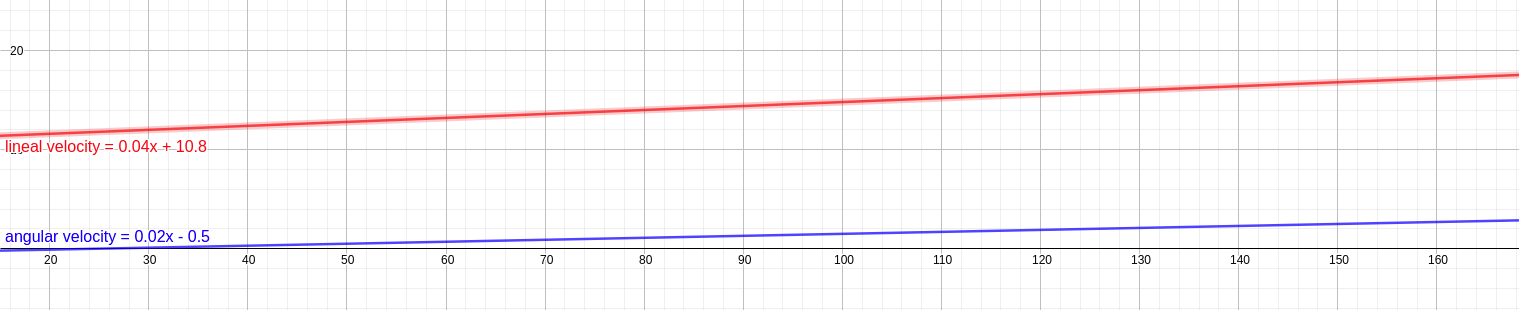
For the implementation of the control algorithm I have worked with an equation that regulates the angular and linear velocity according to the position in which the center point of the line is located, which I mentioned in the previous section. I have obtained this equation by assigning a certain speed to each point on the green line.
VIDEO OF THE SOLUTION
- Lap time simulation: 48 seconds.
- Lap time real: 48 seconds.