Goals of the week(decided in last week’s meeting)
-
Solve Asynspinner issue in ROS2 to complete camviz
-
Refactor carviz
Progress 1
Carviz separated from base repository and rosified completely
- Because of issue discussed in absolute-path-jderobot-libraries I am leaving absolute path in all jderobot libraries that I am using.
N.B.***To use the current carviz-rosfied I have changed file “/opt/jderobot/include/jderobot/types/rgbd.h” , I have put absolute path of image.h here.
Progress 2
Errors in installing Turtlebot3 packages for ROS2 Dashing
Since I got some updates of Turtlebot3 I tried to install the packages as given in ROBOTIS_e-manual . But I got errors and after checking more into it I found updates have been made for OpenCR, maybe have to wait a little more.
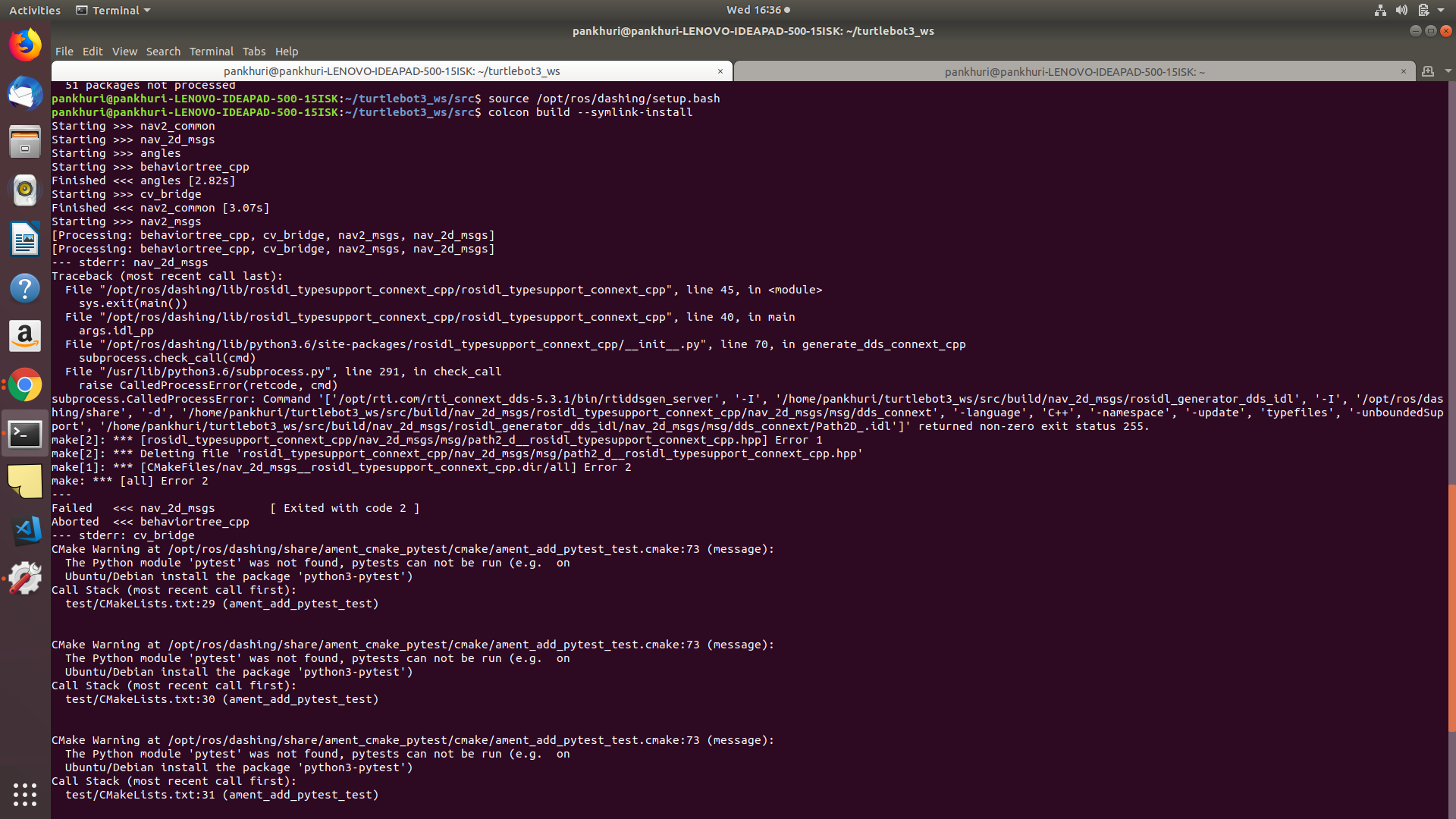
Update: Turtlebot3 packages for ROS2 Dashing will be released on 20th August
Progress 3
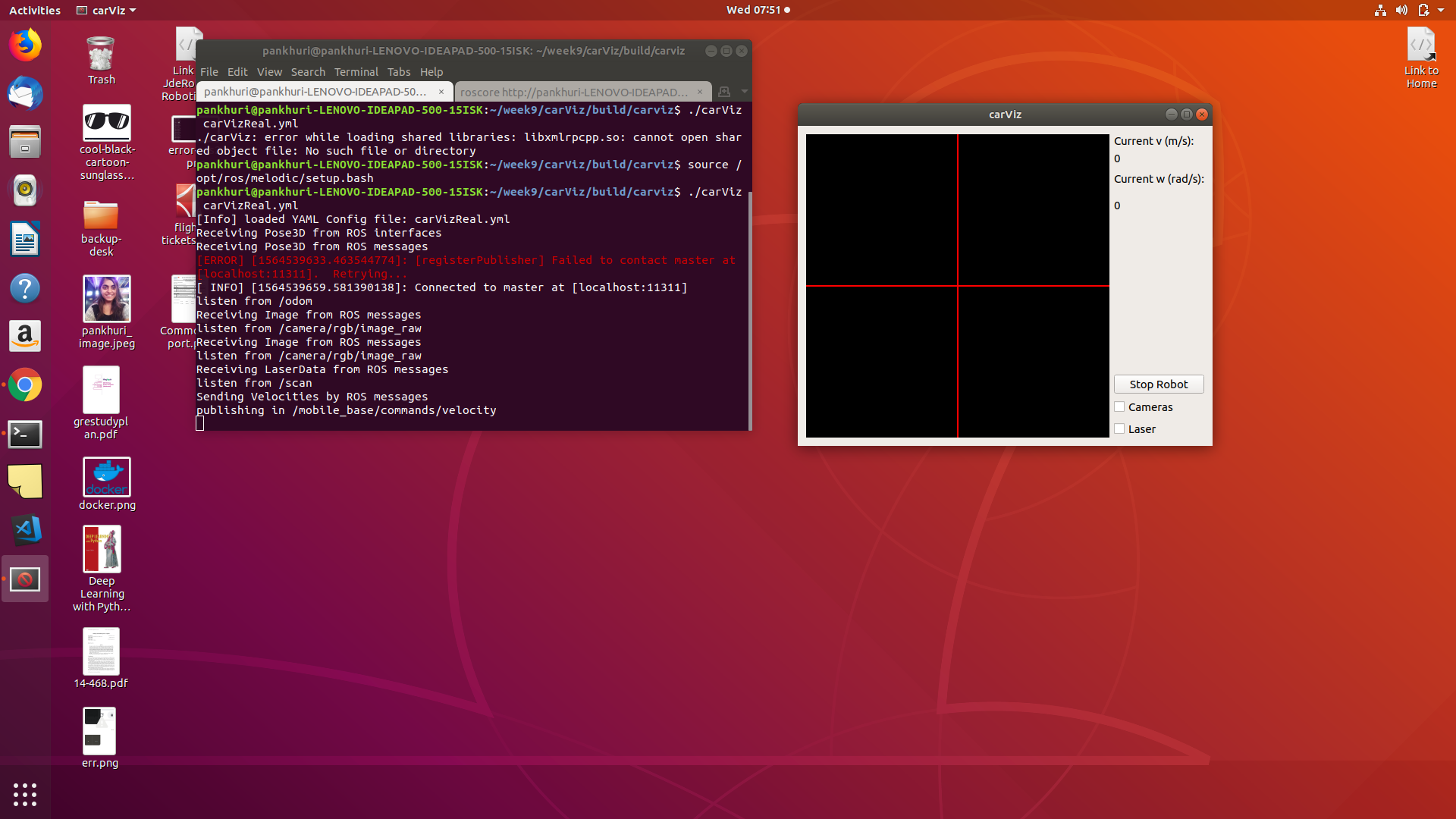
CarViz tested with turtlebot3-waffle
Steps to run the tool:
Terminal 1:
source /opt/ros/melodic/setup.bash
roscore
Terminal 2:
source /opt/ros/melodic/setup.bash
export TURTLEBOT3_MODEL=waffle
roslaunch turtlebot3_gazebo turtlebot3_world.launch
Terminal 3:
cd /folder/carViz/build/carviz$
./carViz carVizReal.yml
(Click on the image to view the video)

Progress 4
ROS2-Camviz
Segmentation fault: Issues open :
Conclusion after debugging: This is not a JdeRobot Image library issue with ROS2. Cameraclient class is not returning the client and giving the segmentation fault
Solved the blocking callback issue in multithreaded::executors by using run (protected member function) instead of spin(which does blocks callbacks)
Currently I am stuck in this part, I don’t have any clue how to go ahead.
Progress 5
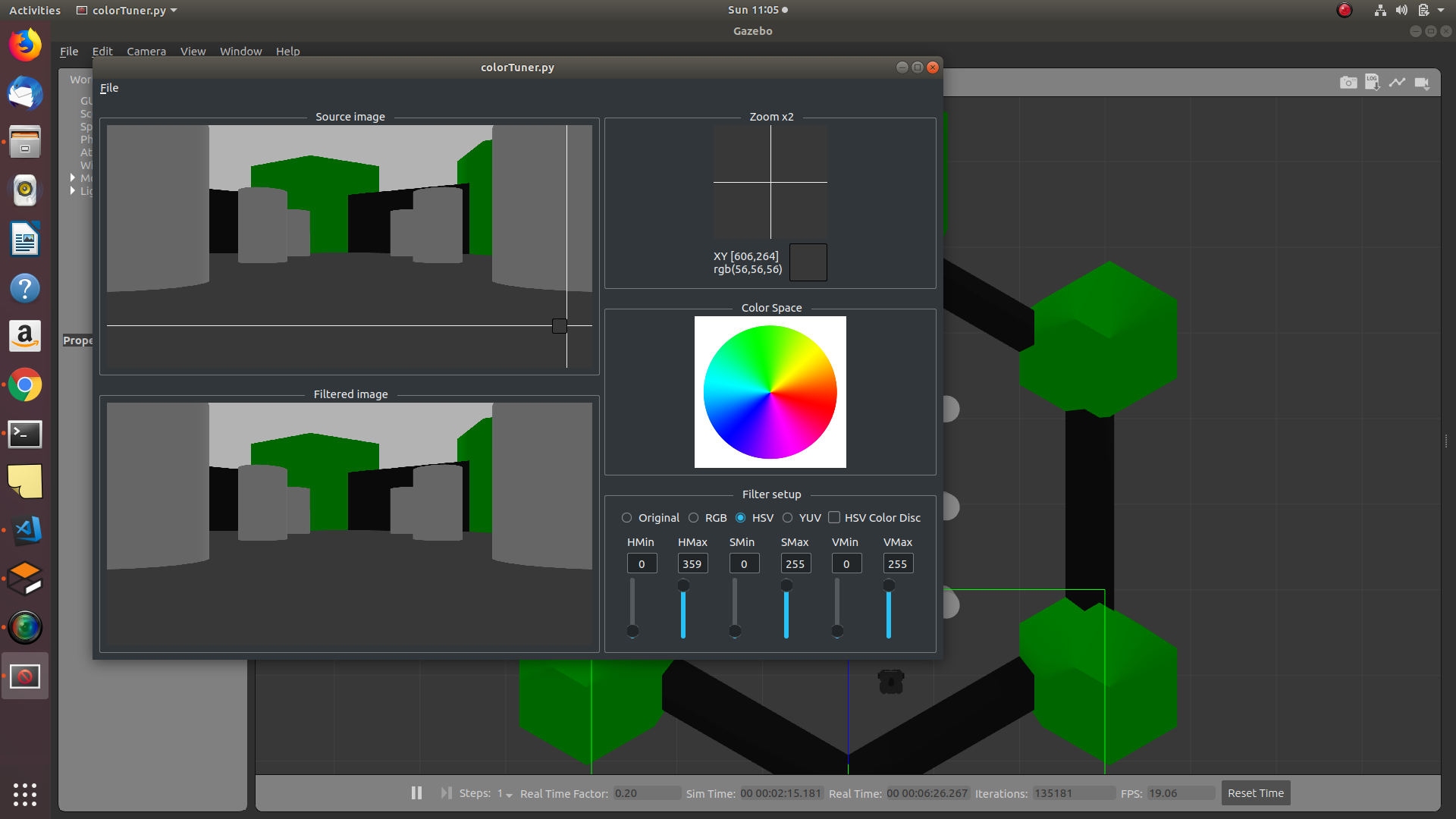
ColorTuner tool
-
Trying to run it using ICE drivers only as I am getting errors. #1381
-
Studying the codebase
-
Studied about structuring a python packages and qt tool with python
Update 1: Colortuner errors solved. Now, working on refactoring it for ROS1
Update 2:
*ColorTuner separated from base repository
*Colotuner rosified, some part of code cleaning left.
ColorTuner tested with carviz tool in gazebo with Turtlebot3