
Coding Period Week 2
In the weekly meet we did the sprint planning and listed out the issues to work on for the coming two weeks.
Sprint 1
Work Done
- Installed and tested PX4 Autopilot v1.14 beta2 locally on ROS2
- Added PX4 Autopilot to Humble Dockerfiles
- Discovered that Gazebo11 is no longer being installed correctly with current gpg key
- Moved Drone assets to RoboticsInfrastructure Repo
Issues Created
Issues Fixed
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/221
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/278
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/280
PRs created
- https://github.com/JdeRobot/RoboticsInfrastructure/pull/297
- https://github.com/JdeRobot/RoboticsAcademy/pull/2119
Details of MRs
-
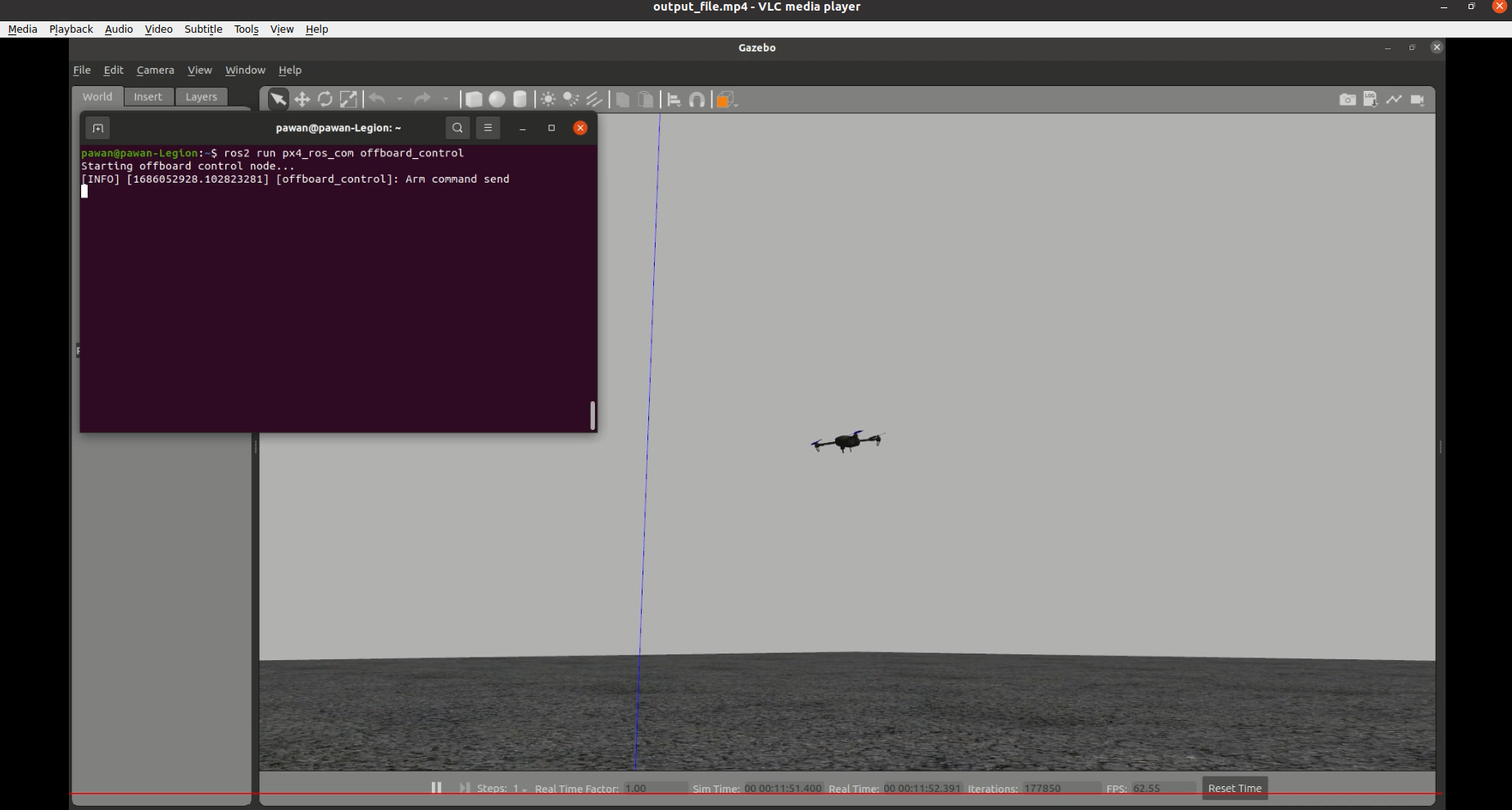
The major target of this week was to make a drone takeoff on ROS2 with PX4, which was accomplished.
-
Added the required setup for PX4-Autopilot to ROS2 Dockerfiles:
- Added system and pip Dependencies
- Added PX4 Autopilot
- Added MicroXRCE-DDS-Agent
- Removed redundant packages
Plan for next week
- Explore multi-distro RADIs