Week 1: May 27 ~ June 02
The goal for this week was to modify the Dockerfiles to create a new RADI with Gazebo Harmonic and test it with xhost +.
Objectives
- Create and test a new RADI with Gazebo Harmonic
Issues Fixed
PRs Created
Work Done
- Modified Dockerfiles to:
- Replace Gazebo 11 with Gazebo Harmonic
- Remove the installation of PX4 and MICRO-XRCE-DDS-AGENT
- Remove the cloning of as2_platform_pixhawk and px4_msgs repositories
- Determined that the CustomRobots package has gazebo-ros and gazebo-ros2-control as dependencies
- Checked out the installation of Gazebo 11 along with Gazebo Harmonic
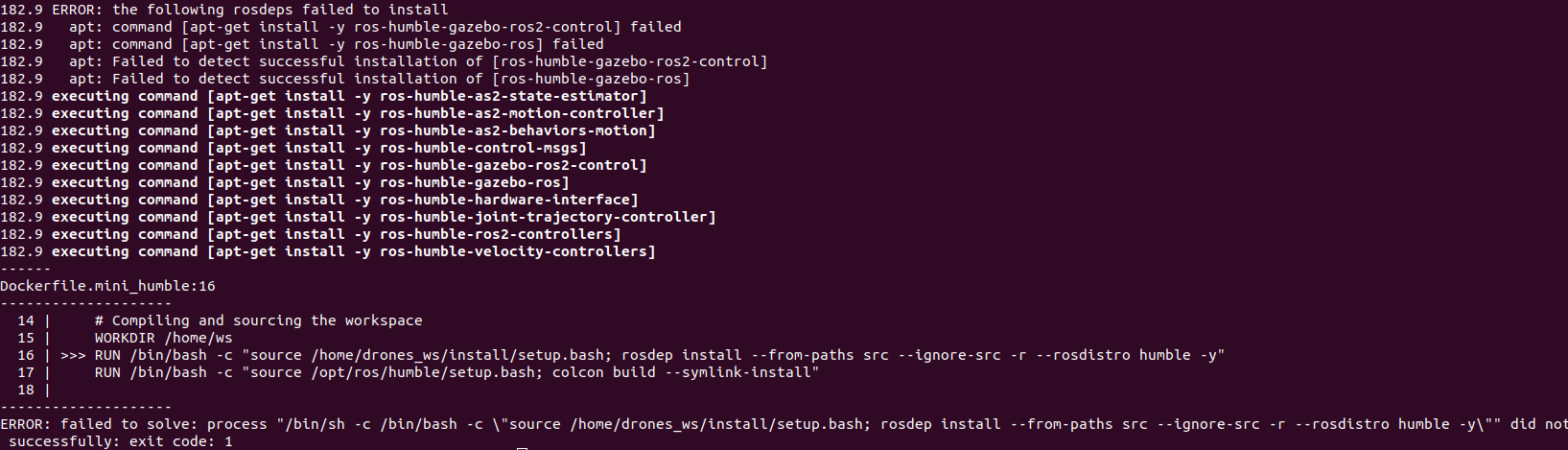
I encountered the following error while building an image from the modified Dockerfiles. Replacing Gazebo11 with Gazebo Harmonic caused installation failures for gazebo-ros2-control and gazebo-ros during rosdep install. These are the dependencies for the CustomRobots package, as specified in its package.xml file. To address this, the sourcing and compiling of the workspace have been temporarily commented out.
Additionally, I tested whether Gazebo11 can be installed alongside Gazebo Harmonic by following the instructions in Installing Gazebo11 side by side with new Gazebo. However, I found that these instructions resulted in only Gazebo Harmonic being installed.
RADI with Gazebo Harmonic
Enjoy Reading This Article?
Here are some more articles you might like to read next: