Week 11 and Week 12: August 05 ~ August 18
Objectives
- Creating a new RAM world type for Gz Sim Drone based exercises
- Addressing and fixing problems related to the Reset button’s operation
Work Done
In our previous meeting, the mentors recommended making changes to the existing Pull Requests by creating a separate launcher for drones for the as2_gazebo_sim file. Following this advice, I created a new world type, Gz Sim Drones, by migrating the Django model. This new world type launches a new drones_gzsim launcher, which in turn starts the Aerostack2 Gazebo Sim launch file. This approach ensures that the previous drone-based exercises remain unaffected, providing a fallback option in case any issues arise with the newly migrated exercise.
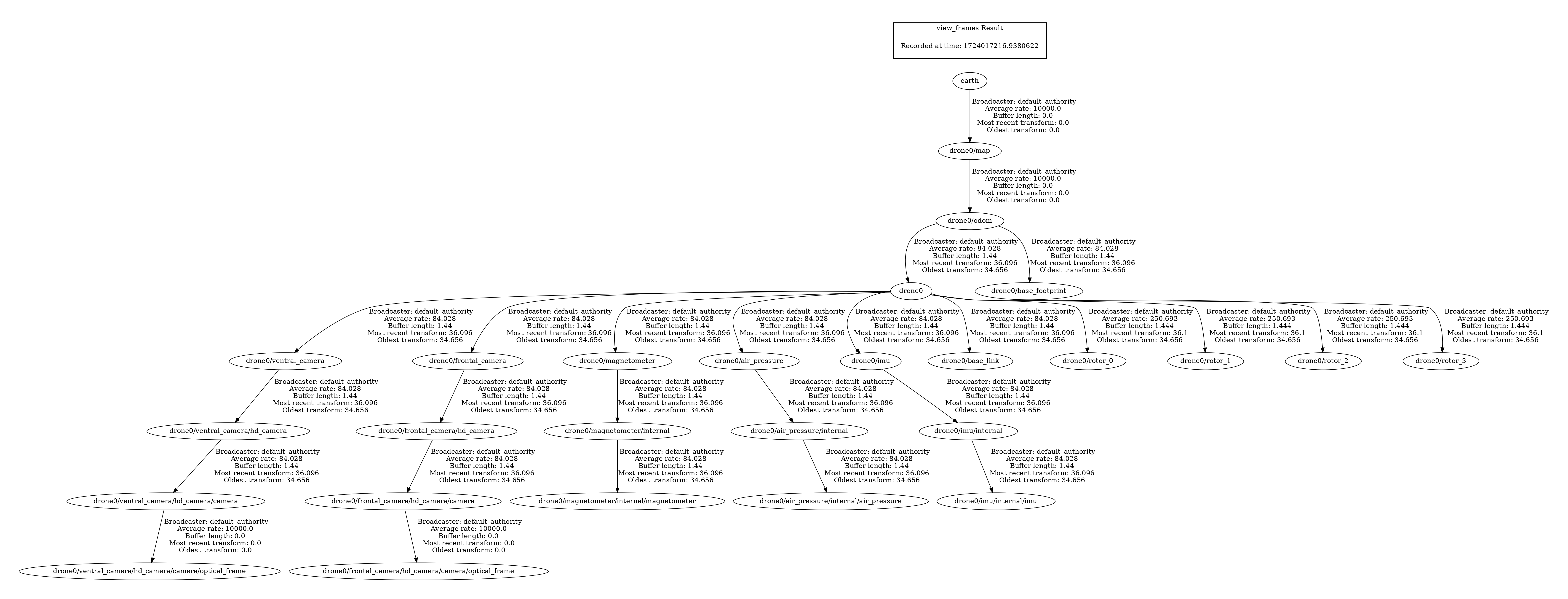
Previously, for the Rescue People exercise, the drone’s position was reset to its initial location using hardcoded values. Pedro suggested an improved solution to make this approach adaptable for different drone-based exercises. As shown in the transform tree figure, there is a static drone0/map frame located at the initial spawn point of the quadrotor. By determining the transform between the earth frame (located at coordinates (0,0,0)) and the drone0/map frame, we can accurately calculate the quadrotor’s initial position. This position will then be used in the Gazebo service to set the quadrotor model’s pose.
Regarding the issue where the quadrotor fails to take off after resetting, Pedro suggested that this might be due to the Aerostack2 state machine not updating post-reset.
The Aerostack2 states and transitions are as follows:
States:
- TAKING_OFF
- FLY
- LANDING
- LANDED
- DISARMED
- EMERGENCY
Transitions:
| Current State | Event | Next State |
|---|---|---|
| TAKING_OFF | TOOK_OFF | FLY |
| FLY | LAND | LANDING |
| LANDING | LANDED | LANDED |
| LANDED | TAKE_OFF | TAKING_OFF |
| LANDED | DISARM | DISARMED |
| DISARMED | ARM | LANDED |
| FLY, LANDING, LANDED, TAKING_OFF | EMERGENCY | EMERGENCY |
When the drone’s position is reset to its initial location, it remains in the FLY state, preventing it from performing a takeoff. Therefore, the Aerostack2 state must also be updated to LANDING and then to LANDED during the reset process.
To address this, I attempted to create a ROS2 service to reset the quadrotor’s pose and update the Aerostack2 state machine. Initially, I implemented the service within the drone_wrapper file but encountered an issue where the application would pause when the reset button was clicked, rendering the service unavailable. This occurs because the terminate_application function is triggered upon pressing the reset button, where the application first pauses before resetting.
To resolve this, I created a new DroneWrapper object within the reset function before calling the service. However, this resulted in a black screen appearing on the VNC server instead of the expected Gazebo Sim simulation.
To work around this, I created a new file, drone_reset.py, with a quadrotor_reset node specifically for the service. I then created a DroneReset class object in the reset function and called the ROS2 service.

Although the service is now available, it’s currently getting stuck at requester: making request: std_srvs.srv.Trigger_Request().

Enjoy Reading This Article?
Here are some more articles you might like to read next: