Week 5 and Week 6: June 24 ~ July 07
Objectives
- Installation of Gazebo11 along with Gazebo Harmonic for the RADI
- Updating CustomRobots Hooks and .env script for Gazebo Harmonic
- Migration of Rescue people world and Follow Road world to Gazebo Harmonic
- Creating a new DDBB entry for the Rescue People Harmonic exercise
Issues Fixed
- https://github.com/JdeRobot/RoboticsAcademy/issues/2569
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/409
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/406
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/403
- https://github.com/JdeRobot/RoboticsAcademy/issues/2634
- https://github.com/JdeRobot/RoboticsInfrastructure/issues/415
PRs Created
- https://github.com/JdeRobot/RoboticsAcademy/pull/2602
- https://github.com/JdeRobot/RoboticsInfrastructure/pull/410
- https://github.com/JdeRobot/RoboticsInfrastructure/pull/413
- https://github.com/JdeRobot/RoboticsInfrastructure/pull/412
- https://github.com/JdeRobot/RoboticsAcademy/pull/2635
- https://github.com/JdeRobot/RoboticsInfrastructure/pull/419
Work Done
The issue with the gazebo11-gz-cli PPA not supporting ROS packages on Jammy (#1152) has been resolved. This allowed me to successfully install Gazebo11 along with Gz Harmonic for the RADI. Previously, I encountered an issue during the installation of the ros-humble-gazebo-ros package, but that has now been fixed. Initially, I had temporarily commented out the sourcing and compiling of the workspaces. However, with the dependency installation issues resolved, I was able to build the workspaces successfully.
I updated the hooks for the CustomRobots package and the .env script for Gz Harmonic. During this migration, I discovered that Gz Sim does not have a separate model path, as it treats both models and worlds as resources. In Gazebo Classic, the environment variables GAZEBO_MODEL_PATH were used for models and GAZEBO_RESOURCE_PATH for worlds and some rendering resources. However, in Gz Sim, GZ_SIM_RESOURCE_PATH is used for worlds, models, and other resources.
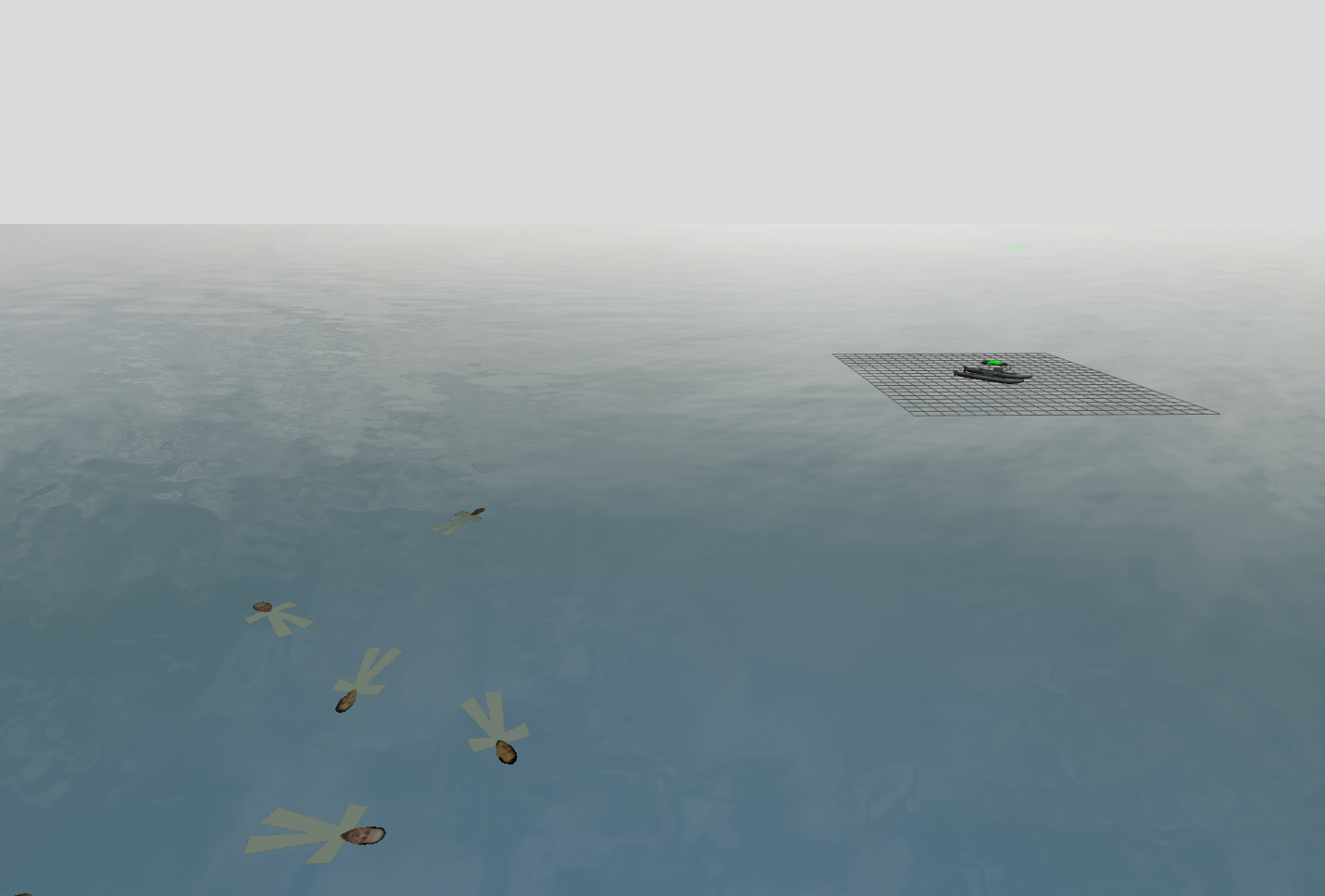
The world file for the rescue people exercise was migrated to Gz Harmonic using the previously migrated drone_assets.
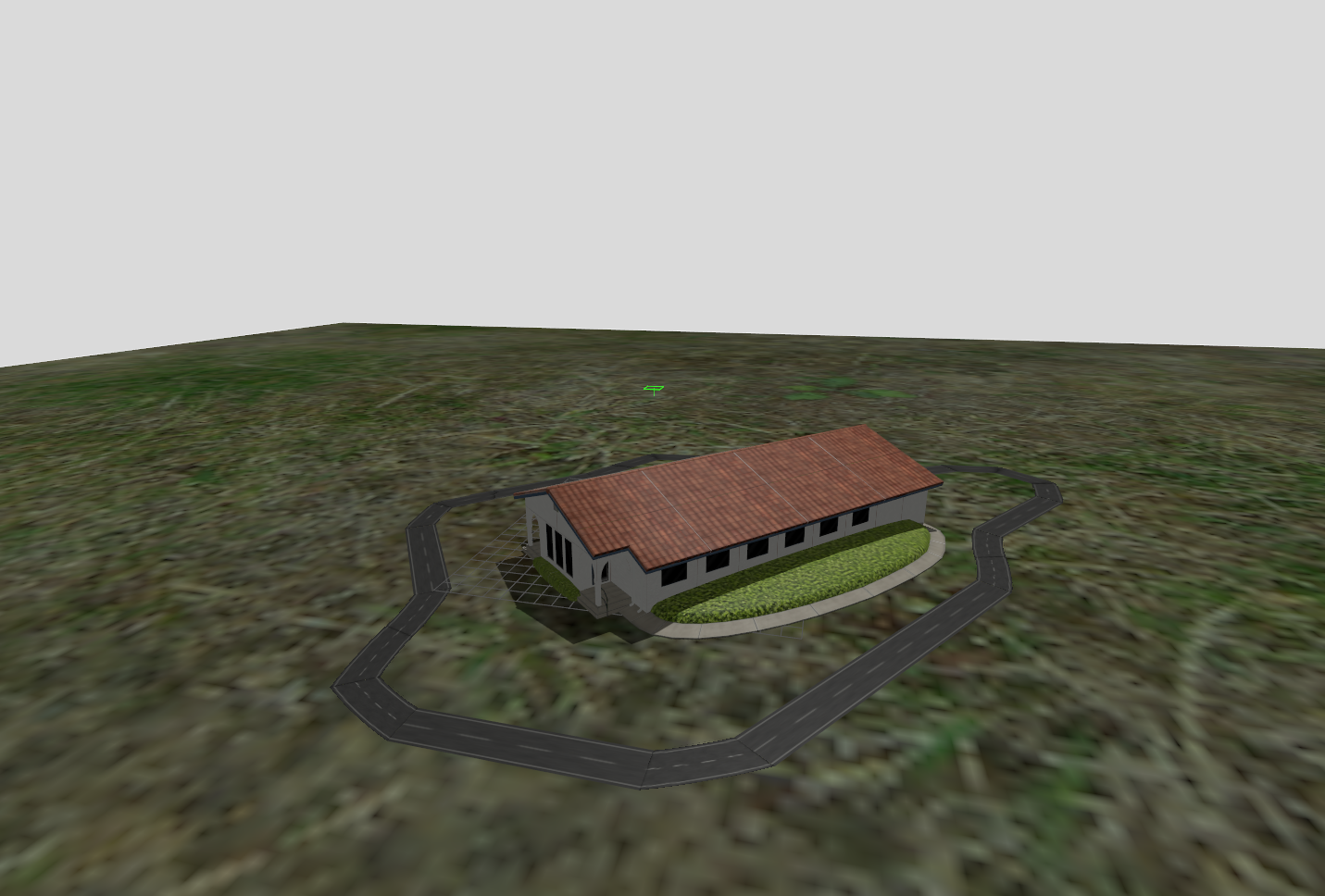
Similarly, the world for the follow road exercise was also migrated to Gazebo Harmonic. During this process, I found that the <road> tag used in the Gazebo Classic world file is not supported in Gz Sim (#2320). To address this, I created two new models for the road track: one for curves and another for straight sections.
A database entry was created for the Rescue People Gz Harmonic exercise. Also, a new Gz Sim world type for the exercise template was created by migrating the Django model. With this new world type, the Gz Sim launcher from RAM will be used to launch the Gazebo GUI.
Enjoy Reading This Article?
Here are some more articles you might like to read next: