Week 7: July 08 ~ July 14
Objectives
- Updating the DDBB entry for Rescue People Harmonic exercise
- Updating drones_ros2 launcher to launch the Aerostack2 Gz Sim launcher
- Updating the Aerostack2 launcher for Gz Sim
Issues Fixed
PRs Created
- https://github.com/JdeRobot/RoboticsApplicationManager/pull/138
- https://github.com/JdeRobot/RoboticsInfrastructure/pull/423
Work Done
Last week, I created a new Gz Sim world type for the exercise template by migrating the Django model. However, while reviewing the RoboticsApplicationManager codebase, I discovered that the GazeboView launcher is launched during the visualization step. Consequently, I had to revert the previous week’s changes and create two new visualization options: Gz Sim GRA and Gz Sim RAE. Now, when these fields are selected for visualization, the new Gz Sim launcher is launched for the Gazebo Sim GUI.
Next, I updated the drones_ros2 launcher, which is used for the drones and ROS2 world type. Instead of launching the aerostack2_default_gazebo_classic launch file, it now launches the aerostack2_default_gazebo_sim launch file from the jderobot_drones package.
I updated the aerostack2_default_gazebo_sim launch file to launch the as2_platform_gazebo and as2_gazebo_assets packages. The as2_gazebo_assets package is now launched in headless mode. This means that only the Gazebo server is started, without the GUI. The Gazebo GUI can be launched separately during the visualization step using the new Gz Sim launcher.
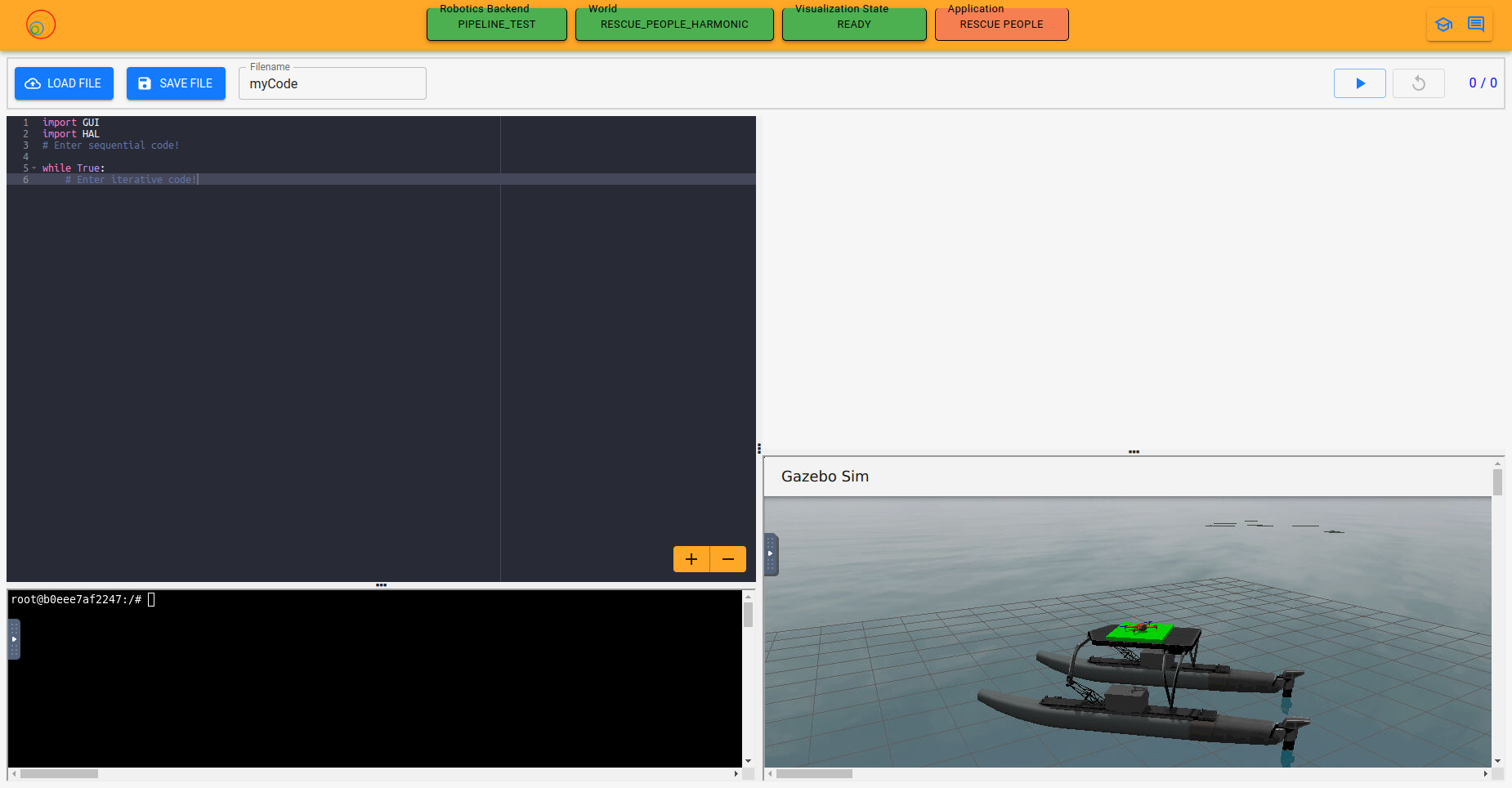
However, I am currently facing two issues. The world starts at the default camera position rather than the one specified in the SDF file of the world. Also, I am encountering an error with the HAL functions: Service drone0 /controller/set_control_mode is not available

Enjoy Reading This Article?
Here are some more articles you might like to read next: