Week 12: Aug 18 ~ Aug 24
Preliminaries
During Week 12 of my GSoC journey, my work revolved around developing an end-to-end visual control exercise drive from the Follow-Line exercise, improving user documentation for digit classification and human detection exercises, and addressing technical issues related to GPU support in the development environment and fixing them.
Objectives
- Develop an End-to-End Visual Control Exercise.
- Update the user documentation for the human detection and digit classification exercise.
- Debug and fix issues in dev mode with GPU Nvidia support.
- Begin preparing user documentation files for the End-to-End Visual Control exercise
Execution
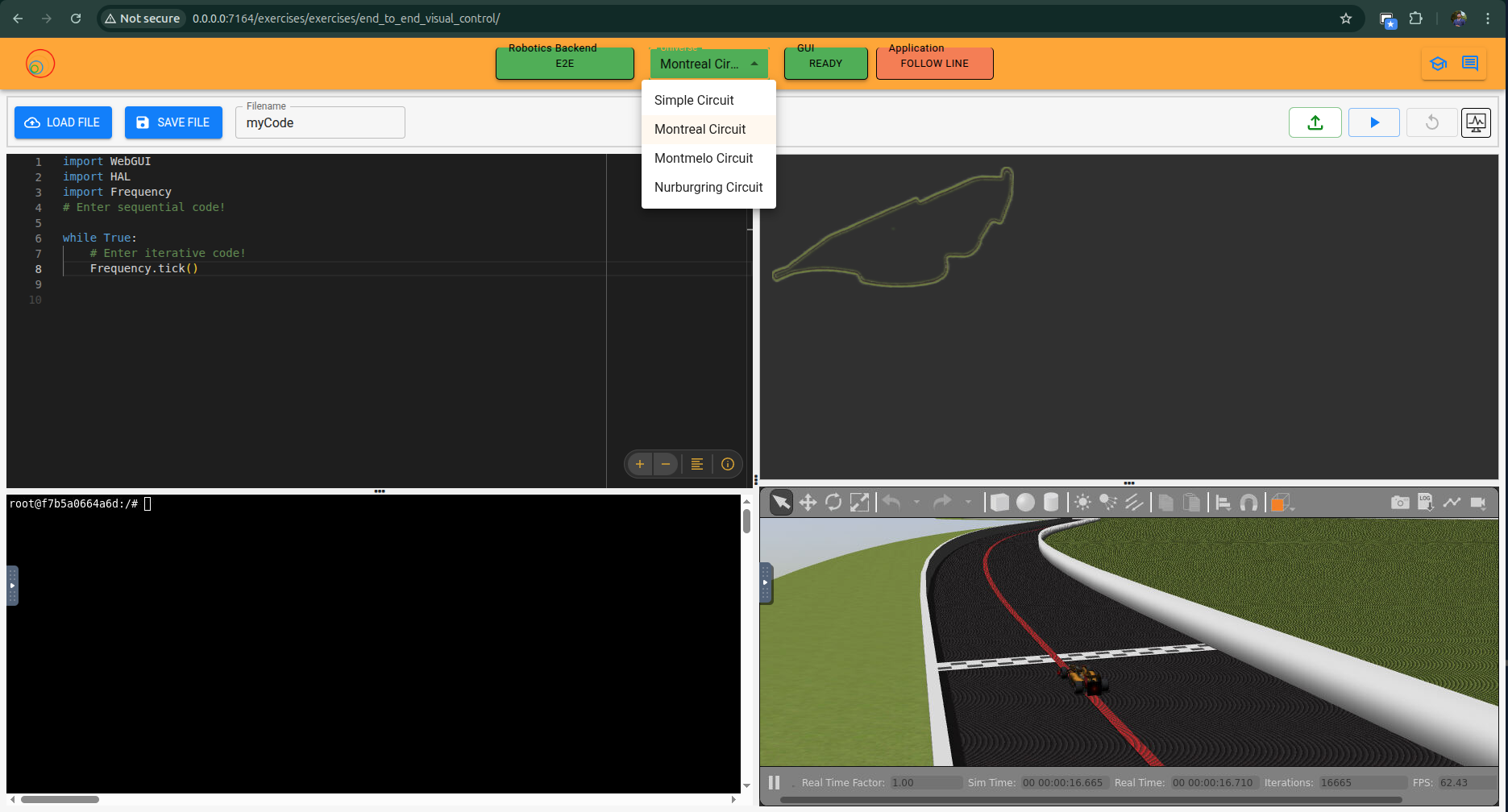
Develop an End-to-End Visual Control Exercise
I developed a new
End-to-End Visual Control
exercise, adapted from the
Follow-Line
exercise. This version introduces
four
distinct circuits, providing diverse
environments to test and evaluate models.
The exercise framework is built with
scalability in mind, ensuring that
additional universes can be seamlessly
integrated in the future. The current
circuits include:
- Simple Circuit
- Montreal Circuit
- Montmelo Circuit
- Nürburgring Circuit
 end-to-end visual control
exercise
end-to-end visual control
exercise
Update the user documentation for the human detection and digit classification exercise
Following the beta testing of the
Digit Classifier
and
Human Detection
exercises, we identified the need to update
the
user documentation
by transitioning from
prototype mode to
running mode. To implement this
improvement, I created
GitHub issues and submitted
pull requests for both
exercises. This update is intended to
streamline the onboarding process and reduce
potential challenges for new users.
Issues:
- [gh-pages] Upgrade Human Detection Prototype to Running Mode #3200
- [gh-pages] Upgrade Digit Classification Prototype to Running Mode #3201
Pull Requests:
Debug and fix issues in dev mode GPU support (dev_humble_nvidia.yml)
While enabling
NVIDIA GPU support in
development mode, I
discovered a bug in the
dev_humble_nvidia.yml file. The
configuration was not compatible and failed
to enable GPU acceleration. I raised the
issue, identified the root cause, and
submitted a pull request with a fix to
restore proper GPU functionality for
developers.
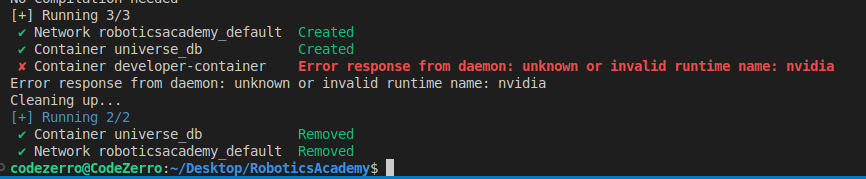
The first step in addressing the issue was
to remove runtime: nvidia from
the
dev_humble_nvidia.yaml file.
This temporary fix allowed the program to
run without errors. However, it does not
connect to the
robotics-database docker image
and fails to enable the
Nvidia GPU, defaulting to
CPU usage instead.
dded GPU support by mounting
"/dev/dri:/dev/dri" and linked
the system with the
robotics-database in the
dev_humble_nvidia.yaml file.
The solution now runs smoothly with full
Nvidia GPU utilization.
The issue:
The pull request:
Begin preparing user documentation files for the End-to-End Visual Control exercise
I started preparing the user documentation files for the newly developed End-to-End Visual Control exercise. This documentation will provide users with comprehensive guidance on how to effectively utilize the exercise and its features.
The documentation will include detailed instructions, examples, and explanations of the exercise's components. It will be structured to ensure that users can easily understand and navigate through the exercise, enabling them to leverage its capabilities for their projects.
The documentation will cover the following aspects:
- Overview of the End-to-End Visual Control exercise
- Installation and setup instructions
- Usage guidelines and examples
- Video Tutorials for visual
The goal is to create a user-friendly documentation that will help users effectively utilize the End-to-End Visual Control exercise and enhance their experience with the Robotics Academy.
Enjoy Reading This Article?
Here are some more articles you might like to read next: