Week 5: June 30 ~ July 7
Week 5 marked a significant milestone in our GSoC journey with the completion of the auto-parking world migration and the submission of our obstacle avoidance improvements for merging. The week also brought an exciting exploration into texture solutions for the F1 Ackermann car, setting the stage for enhanced visual fidelity in our migrated models. After weeks of systematic migration work, seeing these complex environments come to life in Gazebo Harmonic has been incredibly rewarding.
Preliminaries
Building on the strong foundation from Week 4, where we had tackled the initial auto-parking migration challenges and identified key areas for improvement, Week 5 began with a clear roadmap. The collision geometry issues that plagued the parked cars in Week 4 provided valuable insights into mesh compatibility requirements, while the missing static objects highlighted the importance of thorough URI validation in complex world files.
Objectives
- Complete auto-parking world migration with all static objects
- Finalize obstacle avoidance world improvements and submit for merging
- Resolve collision geometry issues for parked car models
- Begin investigation of F1 Ackermann car texture problems
- Conduct comprehensive testing of migrated scenarios
Execution
Auto-Parking World Completion
The auto-parking world migration represented our most complex scenario to date, involving multiple vehicle models, sophisticated sensor arrays, and intricate environmental elements.
Final Implementation Steps:
- Successfully imported all static props including curbs, signs, and lane markings
- Resolved URI path issues that were causing silent model loading failures
- Implemented proper lighting and shadow configurations for realistic visualization
- Validated three-laser sensor array functionality with proper topic remapping
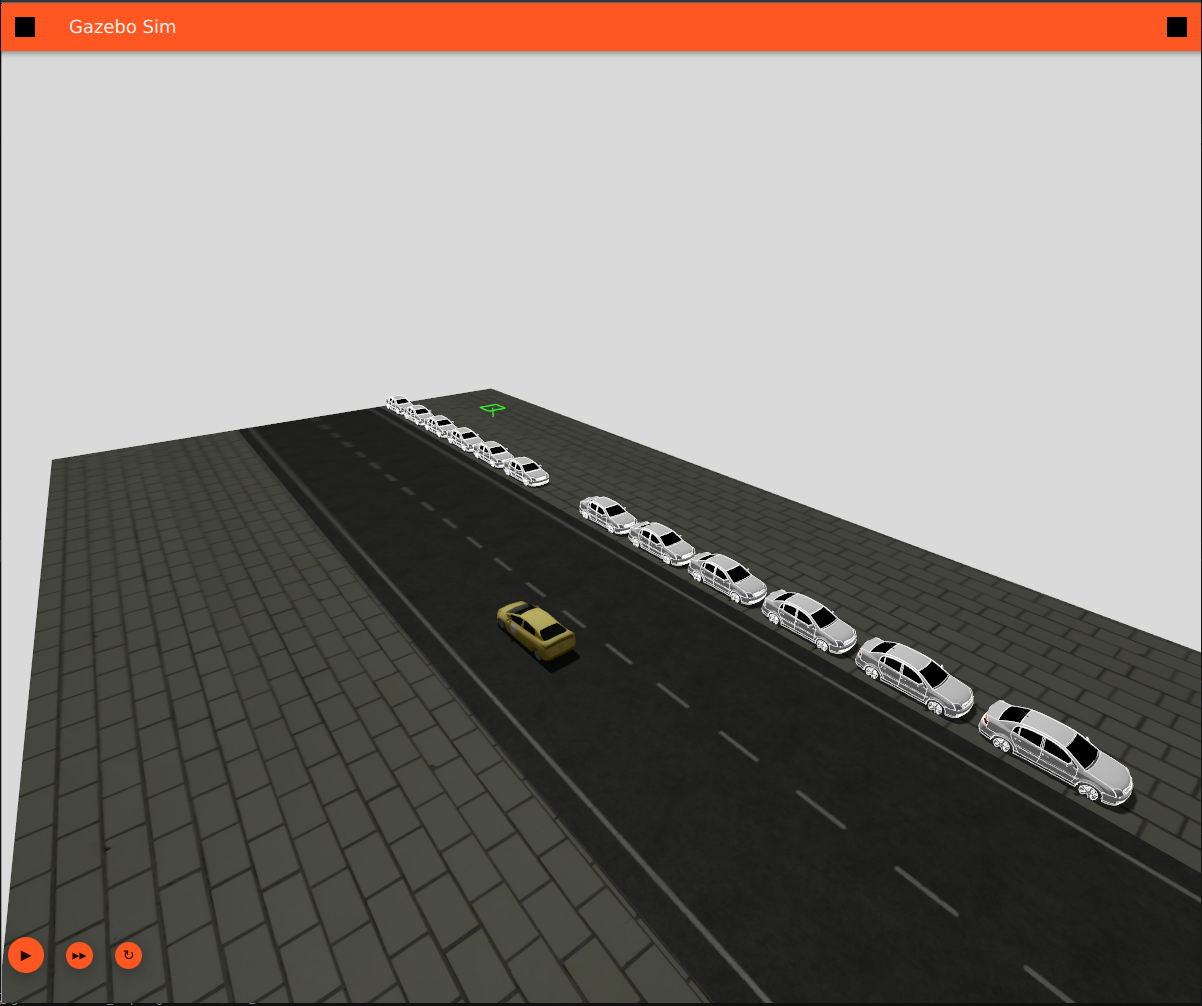
Complete auto-parking environment with all static objects and proper lighting
Collision Geometry Resolution
The collision geometry issues that emerged in Week 4 required a systematic approach to mesh simplification and format conversion.
Solution Implementation:
- Converted complex parked car meshes to simplified convex hull representations
- Utilized Blender's decimation tools to reduce polygon count while maintaining collision accuracy
- Updated SDF collision tags to reference the simplified mesh files
- Verified collision detection functionality through systematic testing
Obstacle Avoidance World Submission
With the obstacle avoidance world thoroughly tested and refined, Week 5 saw the preparation and submission of this work for integration into the main repository.
Submission Preparations:
- Conducted comprehensive regression testing across multiple scenarios
- Updated documentation to reflect migration changes and new features
- Prepared detailed commit messages documenting all changes and improvements
- Coordinated with mentors for code review and integration timeline
Obstacle Avoidance - Final Version
Finalized obstacle avoidance world ready for repository integration
F1 Ackermann Car Texture Investigation
A significant portion of Week 5 was dedicated to investigating and addressing texture rendering issues in the F1 Ackermann car model, which had been displaying inconsistent visual appearance across different scenarios.
Problem Analysis:
- Identified texture loading failures in COLLADA (.dae) mesh files
- Discovered material reference mismatches between mesh files and SDF definitions
- Found texture path dependencies that weren't resolving correctly in Gazebo Harmonic
Solution Exploration:
- Researched mesh format alternatives and their texture handling capabilities
- Investigated OBJ format as a potential solution for better texture compatibility
- Explored direct texture application methods within SDF material definitions
- Began preliminary testing with texture conversion tools and workflows
Comprehensive Testing and Validation
With multiple migration projects reaching completion, Week 5 included extensive testing to ensure reliability and performance across different scenarios.
Testing Coverage:
- End-to-end scenario testing for both auto-parking and obstacle avoidance worlds
- Performance benchmarking comparing Classic vs. Harmonic implementations
- Sensor data validation ensuring proper topic publishing and data formats
- Multi-robot scenario testing to verify scalability
Challenges and Breakthrough Moments
Mesh Compatibility Challenges
One of the week's most significant challenges involved ensuring mesh compatibility across different Gazebo versions while maintaining visual and physical accuracy.
Challenge Details:
- Complex meshes that worked in Classic were causing physics engine errors in Harmonic
- Texture references embedded in mesh files weren't translating correctly
Solution Development:
- Developed a systematic mesh validation workflow using Gazebo's built-in checking tools
- Created mesh preprocessing scripts to automate simplification and validation
- Established clear guidelines for mesh complexity limits in Harmonic environments
Repository Integration Coordination
Coordinating the submission and integration of completed work required careful attention to project workflows and collaboration protocols.
Coordination Efforts:
- Synchronized with mentor schedules for comprehensive code reviews
- Prepared detailed documentation explaining migration decisions and trade-offs
- Established testing protocols for integration verification
Technical Insights and Discoveries
Texture Rendering Architecture
The investigation into F1 car texture issues revealed important insights about how Gazebo Harmonic handles texture rendering compared to Classic.
- Material System Changes: Harmonic's PBR-based rendering requires different material definitions than Classic's simpler approach
- Mesh Format Dependencies: Some texture issues stem from mesh format limitations rather than Gazebo configuration problems
- Asset Path Resolution: Harmonic's stricter asset path handling requires more explicit resource management
Performance and Scalability Insights
Testing complex scenarios provided valuable data about performance characteristics and optimization opportunities.
- Multi-sensor Performance: Harmonic's GPU-accelerated sensor processing shows significant improvements over Classic
- Physics Optimization: Simplified collision meshes not only solve compatibility issues but also improve simulation performance
- Memory Management: Proper asset organization becomes more critical as scenario complexity increases
Next Steps and Week 6 Preview
1. Texture Solution Implementation
- Complete investigation of OBJ format conversion for F1 Ackermann car
- Implement comprehensive texture solution with proper material definitions
- Validate texture rendering consistency across different scenarios
2. Repository Integration Follow-up
- Support code review process and address any integration feedback
- Monitor repository integration and ensure smooth deployment
- Prepare for expanded community testing and feedback
3. Advanced Scenario Exploration
- Begin exploration of additional complex scenarios for migration
- Investigate autonomous navigation environments and their specific requirements
- Develop migration strategies for scenarios with dynamic elements
Reflection and Looking Forward
Week 5 felt like a pivotal moment in our GSoC journey. Completing the auto-parking world migration and submitting our obstacle avoidance work for integration represents significant progress toward our goal of comprehensive Gazebo migration solutions. The texture investigation for the F1 Ackermann car has opened up new avenues for improving visual fidelity across all our migrated models.
The systematic approach we've developed over the past five weeks continues to prove its value. Each new challenge builds on previous learnings, and our migration tooling becomes more sophisticated with every scenario we tackle. The positive feedback from mentors and the robotics community validates that our work is addressing real needs and pain points in the Gazebo migration process.
Key Achievements This Week:
- Successfully completed migration of the most complex scenario attempted to date
- Submitted production-ready work for community integration
- Identified and began addressing important visual fidelity improvements
- Established robust testing and validation workflows for complex scenarios
Lessons Learned:
- Complex scenarios require iterative testing and refinement rather than single-pass migration
- Visual fidelity issues often stem from fundamental asset format compatibility rather than configuration problems
- Community integration requires careful coordination and comprehensive documentation
- Performance optimization opportunities often emerge from solving compatibility challenges
Looking ahead to Week 6, I'm excited to complete the texture solution for the F1 Ackermann car and see our obstacle avoidance work integrated into the main repository. The foundation we've built positions us well for tackling even more complex scenarios and expanding the impact of our migration work across the broader robotics community.
The journey from basic model migration to complex world scenarios with visual enhancements showcases the potential for systematic, well-tested migration approaches to deliver real value. I look forward to continuing this momentum and exploring new frontiers in robotics simulation migration!