Week 7: July 14 ~ July 21
Week 7 marked the extended final week of our GSoC journey—a culmination of intensive development efforts and the completion of our most ambitious migration tasks. During this extended week, we successfully completed the migration of both the autonomous navigation world and car to Gazebo Harmonic, representing the pinnacle of complexity in our project. Despite encountering significant challenges with road texture implementation, innovative problem-solving approaches led to effective solutions that maintained the visual integrity and functionality of these critical simulation environments.
Preliminaries
Week 7 began with high momentum following the successful completion of previous migration milestones. The autonomous navigation world and car represented our final migration challenges. The week's extended timeline provided the necessary buffer to tackle these comprehensive migration tasks with the attention to detail they demanded.
Objectives
- Complete migration of autonomous navigation world to Gazebo Harmonic
- Migrate autonomous navigation car
- Resolve road texture implementation challenges using innovative solutions
- Prepare final deliverables and demonstration materials
Execution
Autonomous Navigation World Migration
The autonomous navigation world migration had a major challenge which was to add road textures to the world. The main task was migrating the world's models, this involved converting all the associated meshes.
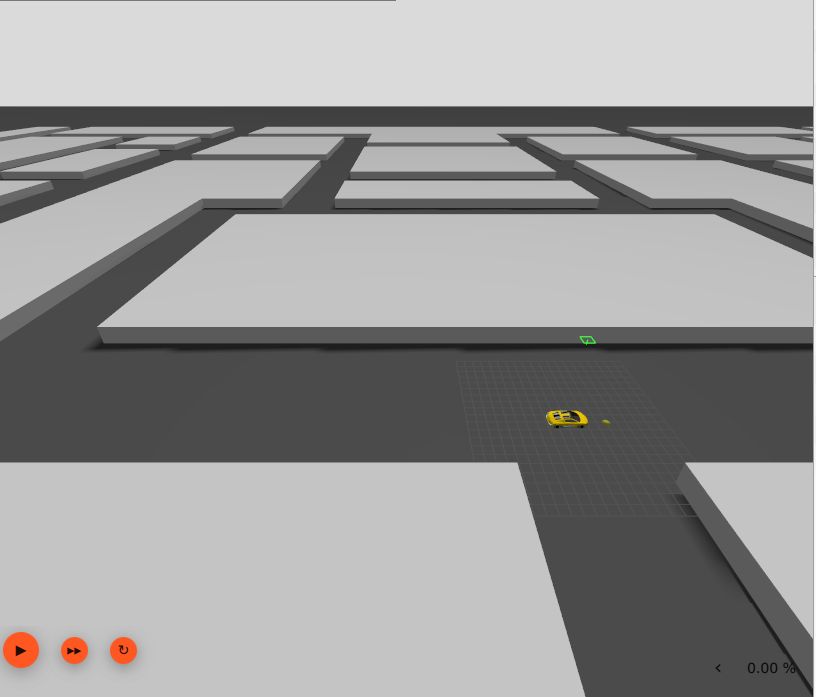
Fully migrated autonomous navigation world showing complex urban environment with roads, buildings, and navigation infrastructure
Autonomous Navigation Car Migration
I also migrated the holonomic drive car. The process involved updating its SDF file and ensuring its controller plugins were correctly configured and functional in the new version of Gazebo.
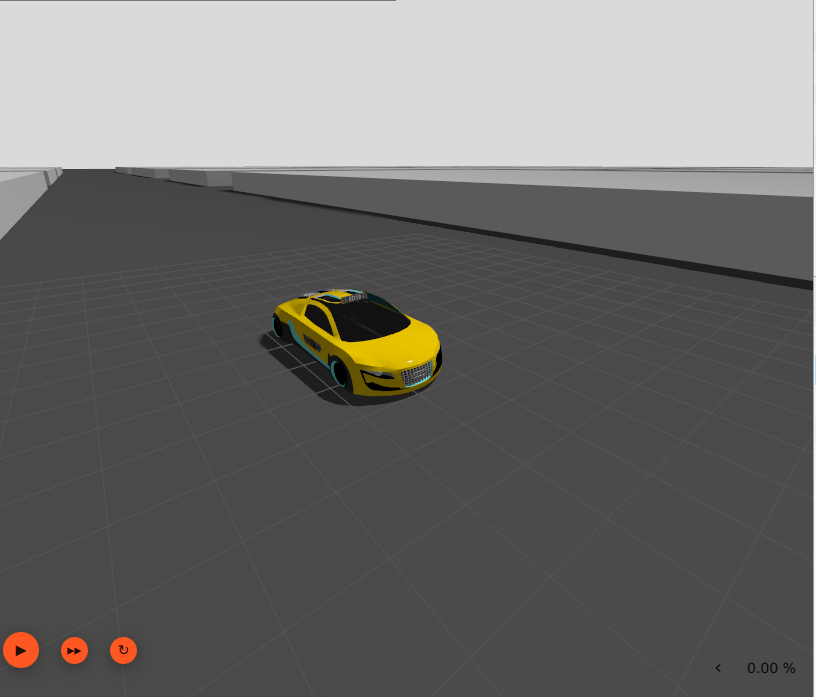
Autonomous navigation car with complete sensor suite and enhanced visual fidelity in Gazebo Harmonic
Road Texture Implementation Challenges and Solutions
One of the most significant technical challenges encountered during Week 7 was the implementation of road textures in the autonomous navigation world. Despite extensive efforts using Blender and various texture application techniques, traditional approaches proved insufficient for Gazebo Harmonic's rendering requirements.
Innovative Solution Implementation:
After extensive testing and experimentation, the most effective solution proved to be the implementation of a black ground plane that provided visual contrast and definition to the road systems while maintaining optimal rendering performance.
- Ground Plane Strategy: Created a unified black ground plane that serves as the base for all road systems, providing clear visual definition and contrast
- Performance Optimization: The ground plane solution eliminated texture loading overhead while maintaining visual clarity for navigation testing
- Visual Consistency: Ensured consistent visual appearance across all road segments and intersection areas
- Navigation Compatibility: Maintained proper visual landmarks and road boundary definition essential for autonomous navigation algorithms
Demonstration Videos:
The completed migration deliverables include comprehensive demonstration videos showcasing both the autonomous navigation world and car in full operation:
Technical Achievements and Methodologies
Comprehensive Migration Framework
Week 7's completion of the autonomous navigation components represents the culmination of our comprehensive migration framework development, now proven across the full spectrum of complexity from simple models to sophisticated multi-system environments.
Framework Components:
- Assessment Protocol: Systematic analysis procedures for evaluating migration complexity and requirements
- Mesh Conversion Pipeline: Automated conversion workflows using Assimp tools for optimal Gazebo Harmonic compatibility
- Sensor Integration Framework: Standardized procedures for maintaining sensor functionality across migration boundaries
- Performance Optimization: Comprehensive optimization strategies for maintaining simulation performance
- Validation Testing: Multi-level testing protocols ensuring functional and performance validation
Challenges and Breakthrough Solutions
Texture Implementation Complexity
The road texture implementation challenge represented one of the most technically demanding aspects of Week 7, requiring extensive experimentation and innovative thinking to achieve an effective solution.
Technical Challenge Details:
- Gazebo Harmonic's updated material system required different texture application approaches compared to Gazebo Classic
- Complex road geometry with multiple intersection points created UV mapping complications
- Blender-based texture application attempts did not produce fruitful results
- Performance implications of complex texture systems could have impacted simulation real-time requirements
Solution Evolution:
- Initial Approach: Traditional texture application using Blender workflows and material definition updates
- Intermediate Testing: Multiple texture formats and application techniques tested for compatibility
- Final Innovation: Ground plane solution providing optimal balance of visual clarity and performance
- Validation Success: Comprehensive testing confirmed navigation functionality and visual effectiveness
Project Completion and Impact
Comprehensive Deliverables
Week 7's completion represents the delivery of a comprehensive suite of migration solutions that significantly enhance the robotics community's access to advanced simulation environments in Gazebo Harmonic.
Migration Portfolio:
- Obstacle Avoidance World: Successfully integrated into main repository with community adoption
- F1 Ackermann Car: Complete texture solution with advanced mesh conversion techniques
- Autoparking Systems: Multi-sensor integration with comprehensive navigation capabilities
- Autonomous Navigation Environment: Migration featuring environments and advanced robotics platforms
Technical Contributions:
- Comprehensive migration framework applicable to future robotics simulation migrations
- Advanced mesh conversion techniques using Assimp tools
- Performance optimization strategies for complex simulation environments
- Innovation problem-solving approaches for challenging technical requirements
Community Impact and Adoption
The completion of our GSoC project establishes a significant foundation for broader community adoption of Gazebo Harmonic in robotics education and research.
- Educational Impact: Migrated worlds provide essential simulation environments for robotics curriculum development
- Research Enablement: Advanced autonomous navigation environments support cutting-edge robotics research
- Community Standards: Migration methodologies establish best practices for future simulation migrations
- Technical Knowledge Transfer: Comprehensive documentation enables community members to apply our techniques independently
Reflection and Future Impact
Week 7's completion of our GSoC project represents not just the successful migration of complex simulation environments, but the establishment of comprehensive frameworks and methodologies that will continue to benefit the robotics community long beyond the scope of this project.
Technical Excellence Achievement:
- Successfully migrated simulation environments spanning the full complexity spectrum from basic models to sophisticated multi-system environments
- Developed innovative solutions to challenging technical problems, including texture implementation and mesh conversion challenges
- Established performance optimization standards that maintain real-time simulation requirements
Innovation and Problem-Solving:
- Demonstrated adaptability and creative thinking when conventional approaches proved insufficient
- Developed alternative solutions that often provided superior performance compared to original implementations
Community Impact and Legacy:
- Established migration methodologies that serve as community standards for future projects
- Created educational resources that enable the next generation of robotics developers
- Provided research infrastructure that supports advanced autonomous navigation development
- Fostered community collaboration and knowledge sharing through comprehensive documentation and open-source contribution
Personal Growth and Learning:
- Developed deep technical expertise in robotics simulation, 3D graphics, and software migration
- Enhanced problem-solving skills through tackling complex, multi-faceted technical challenges
- Gained valuable experience in open-source development, community collaboration, and project management
- Built lasting connections with the robotics community and established foundation for ongoing contribution
Final Acknowledgments and Future Directions
The successful completion of this GSoC project would not have been possible without the support and guidance of the JdeRobot community, Google Summer of Code program, and the broader robotics community. The collaborative nature of open-source development enabled innovative solutions and comprehensive testing that greatly enhanced the quality and impact of our work.
Week 7 represents the culmination of an intensive, rewarding, and impactful GSoC journey. The technical challenges overcome, innovative solutions developed, and community contributions established provide a strong foundation for continued growth and impact in the robotics simulation community. The experience has been transformational both personally and professionally, establishing lasting connections and creating valuable resources that will continue to benefit the community for years to come.
Thank you to Google Summer of Code, JdeRobot, and the entire robotics community for making this incredible journey possible!