Week 1
in Blog
GSOC Coding Week 1 Progress Report
Week 1: Starting with the Legacy Machine Vision Exercise
During the first week, we identified a major issue: the current version of the Machine Vision exercise isn’t working as expected. After discussing with my mentors, we decided to go back to a fully functional version from five years ago and use that as the base for our migration.
Before we build something new, we must understand what already exists. Rebuilding from a known working base allows us to:
- Pinpoint what made the original exercise effective
- Identify which parts need the most attention in the migration
- Lay the groundwork for a clean, modular ROS2 version with a user-friendly Python API
What I Did This Week
Here’s what I’ve completed so far:
- ✅ Reviewed the legacy codebase from the old JdeRobot IndustrialRobotics repo
- ✅ Wrapped the exercise into a Docker image for easier reproducibility and onboarding
- ✅ Created GPU-enabled run scripts (
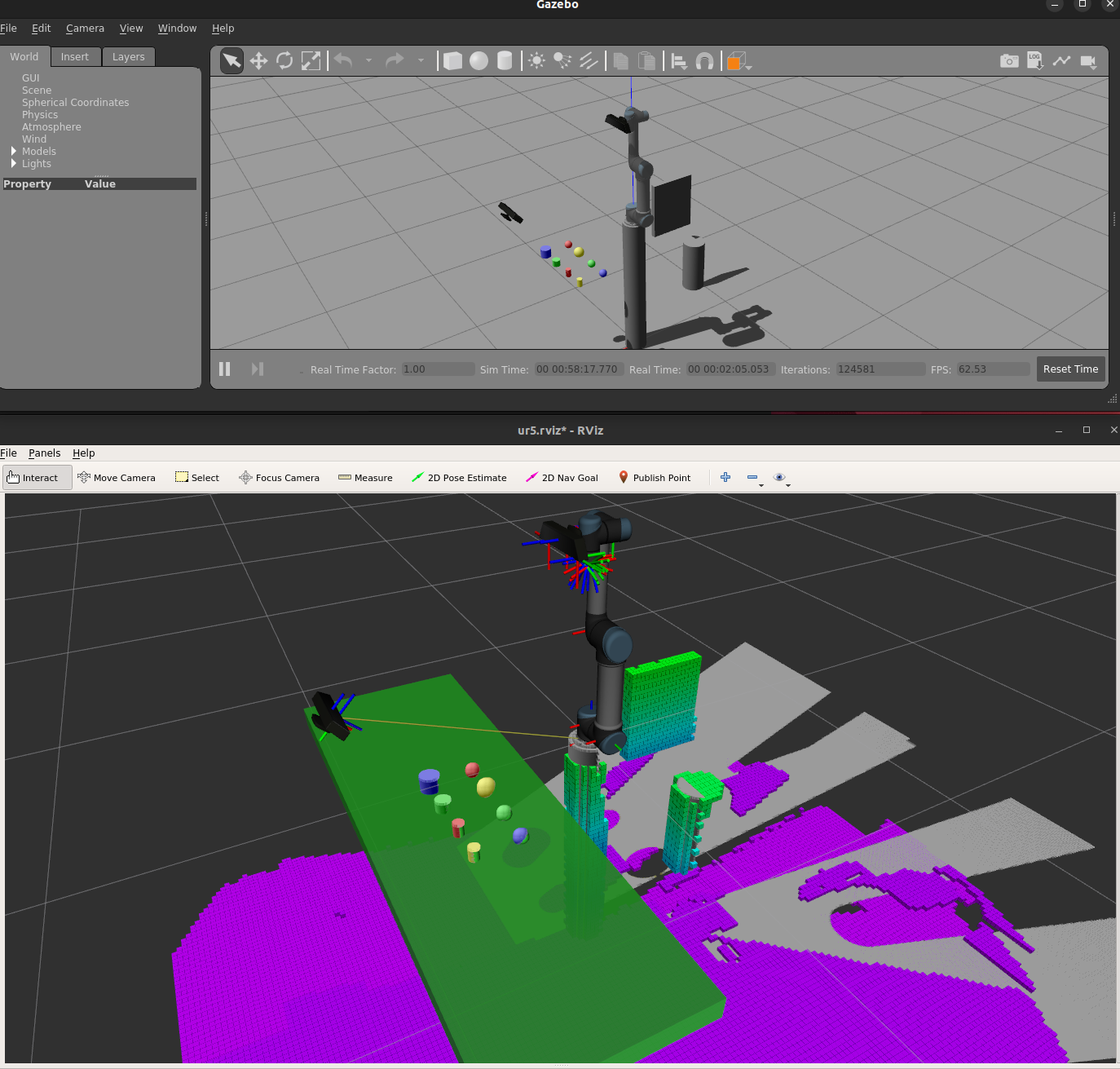
build_image1.sh,run_user_nvidia1.sh) - ✅ Successfully launched the Gazebo simulation environment
- ✅ Fixed some typos in the original codebase from the old repository
⚠️ Currently debugging the algorithm code (
MyAlgorithm.py)—object detection via pointcloud filters is not functioning yet- Initial test
Debugging the Old Code
Although the simulation runs correctly, the core pick-and-place logic isn’t producing the desired behavior. The color and shape filters seem to be publishing inconsistently, and TF frames (like green_cylinder) aren’t always available for object pose extraction.
Additionally, I encountered a few more issues during testing:
- Some parts of the Gazebo environment are not fully loading — certain objects or models are missing or not spawning as expected.
- A number of parameters are still referencing outdated configurations, such as:
self.arm = moveit_commander.MoveGroupCommander("irb_120") self.gripper = moveit_commander.MoveGroupCommander("robotiq_85")
Next week’s focus will be:
- Hardcode a pose for testing motion planning only
- Visualize filter results in Rviz and the GUI
- Document findings and prepare for the ROS2 version
Stay tuned for more updates!
Feel free to check out the GSoC project repo or reach out if you’re working on something similar — always happy to connect and collaborate!
📍 Posted from Barcelona, Spain
🧠 Project: Migration and Enhancement of Machine Vision Exercise to ROS2 + MoveIt2