To create the models in gazebo, I thought that the models of the 3DR Solo and Iris made available in the JdeRobot repository could be used directly. Unfortunately, there is an issue in these files that does not allow the FCU (PX4) to connect to MAVROS.
[INFO] [1559168066.506380, 15.520000]: FCU not connected
[INFO] [1559168066.558471, 15.572000]: FCU not connected
[INFO] [1559168066.607304, 15.620000]: FCU not connected
[INFO] [1559168066.655244, 15.668000]: FCU not connected
[INFO] [1559168066.707429, 15.720000]: FCU not connected
[INFO] [1559168066.754438, 15.768000]: FCU not connected
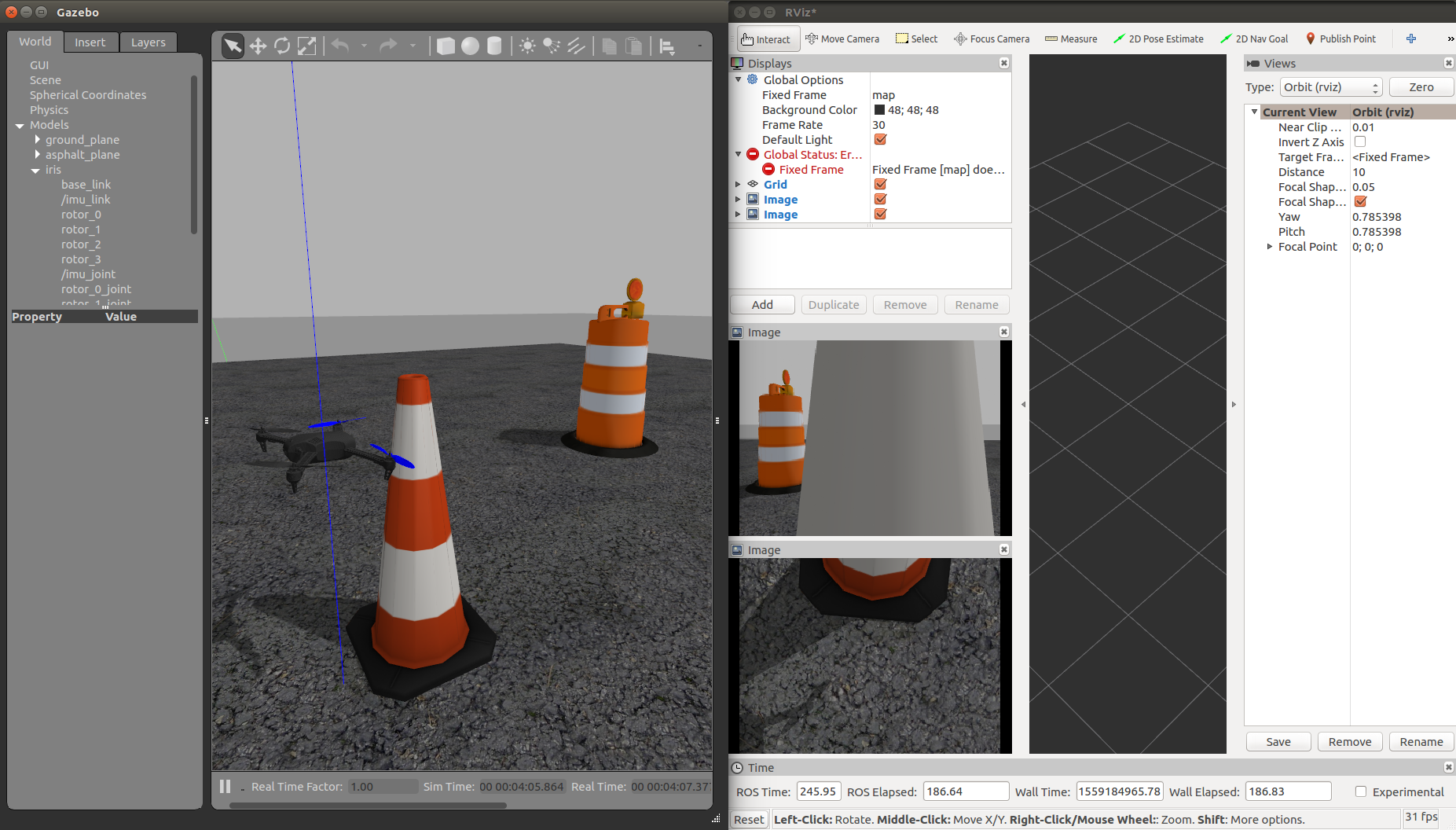
This prompted me to create my own sdf file for both of these as incremental testing would allow me to find the bug easily. I also found that there already existed models in the PX4 repository for the 3DR Iris with the required camera here. However, that is when I ran into the next problem. The exercises require the existence of two cameras - frontal and ventral. Of course, the logical method for this is to simply include the two cameras with different <name> and <pose> tags in the SDF file for the drone (Iris/Solo), but unfortunately there is no method for remapping the topic names in SDF (only name, pose and static tags are parsed in SDF include tags). This, coupled with the fact that PX4 is moving towards using URDFs, Xacros and RotorS and this post on the PX4 discussion page prompted me to use and modify the Xacros provided in the PX4 SITL repository for adding the two cameras.
Hence, after going through all the different launch files provided in PX4, I created my own launch file that parses the 3DR Iris Xacro (with the newly added cameras) and launches it with MAVROS and PX4 SITL. This file shall be included in almost all other launch files. A video of the working code with the previous position controller (click the image to play):