RoboticsAcademy - Follow Road
The follow-road exercise is akin to a line follower with a drone. In this, a solution for the control of the AR-Drone is made using OpenCV to segment and find the alignment of the road while the JdeRobot API is used to send commands to the drone.
A solution for this exercise is required to verify the correct working of the exercise when ported to using the new backend: ROS, PX4 and MAVROS.
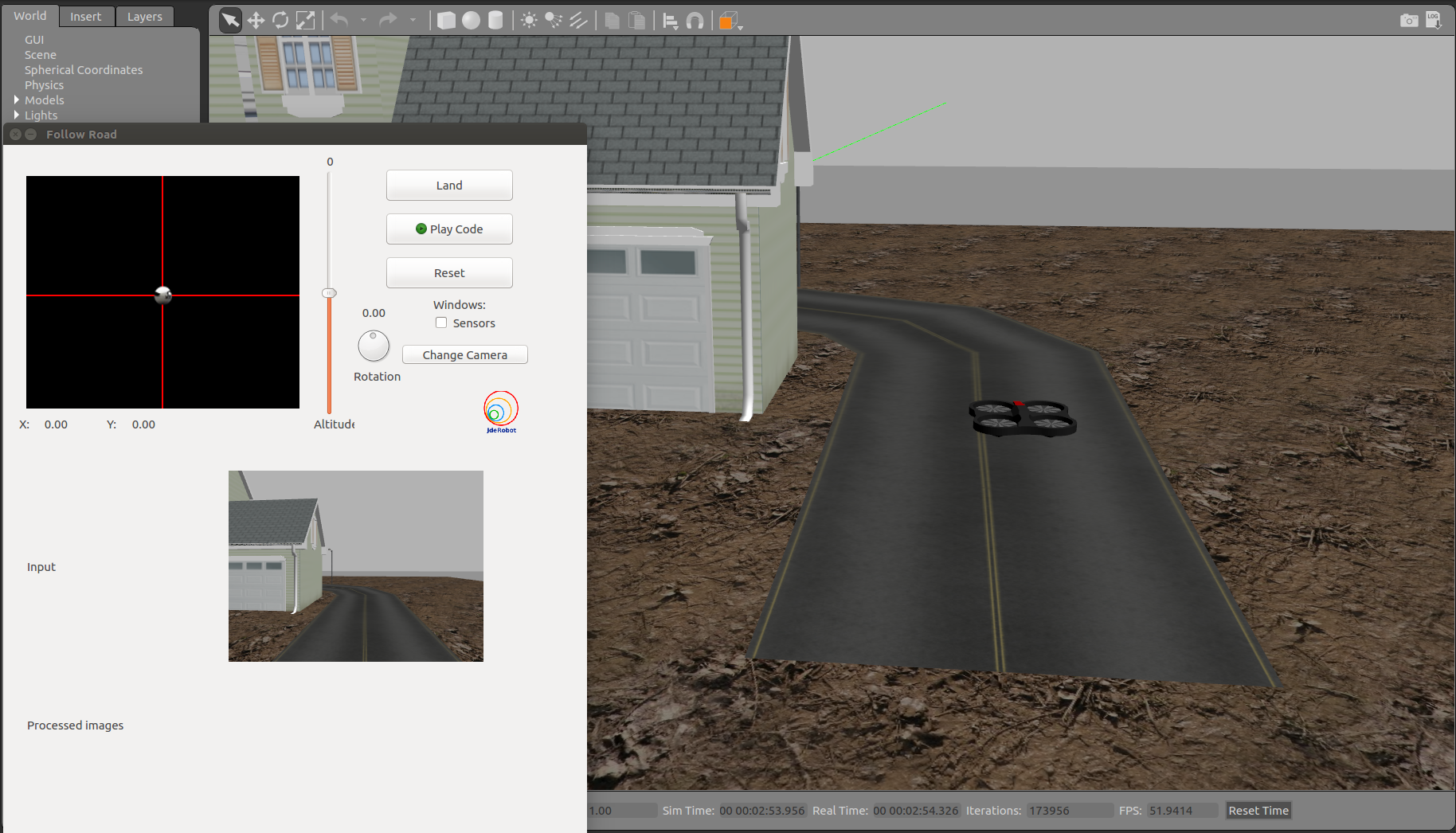
The current solution was implemented in the following steps:
- Using the colorTuner, the HSV region is found that best segments the road and background.
- These values are used to segment the recieved image (after its conversion from BGR to HSV)
- Contours are found in the lower half of the image (as this solution utilizes the front camera of the drone flying at a very low altitude) and the longest contour, presumably representing the largest segment of visible road, is used to fit an ellipse.
- The center of this ellipse is passed to a proportional controller on the angular rate which is futher bounded by a maximum allowed angular velocity.
- The drone is sent the result of the controller and a constant forward velocity using the JdeRobot API
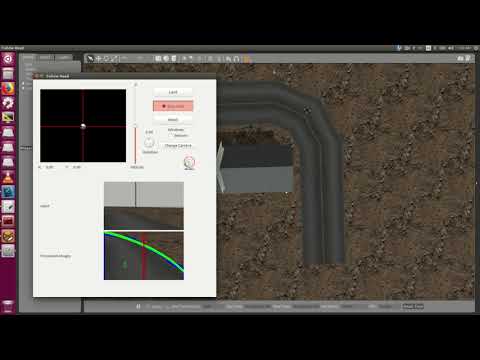
- The ellipse, its center, the selected contour and a central line are drawn for visualization purposes.
(Click on the image for the video)
MAVROS Exercise
The second task for this week was to make a ROS project using the new infrastructure (MavROS-based) to execute a complete closed trajectory (take off, hover, fly, hover, land at the take-off point) at a given height, just using relative speed commands (forward speeds, yaw rotation speeds).
The requirement presented by this task, though fulfilled by modifying the offb_position_control for velocity control and further for an entire trajectory was a simple but hacky approach to verify the feasibility of velocity based control in the body frame.
The real requirement, for both, this task and all exercises is a class that will able to abstract all the functions of MAVROS and present something as simple as:
drone = DroneWrapper(verbose=True)
drone.takeoff()
drone.set_cmd_vel(vx=1,az=1)
drone.land()
to fly in a circle (with appropriate sleep commands of course). For this, I present DroneWrapper as a solution.

This class (built taking help from previous work and [1] [2] [3] [4] [5] ) provides a simple API for some of the various functions required in the exercises. The code for the task is made as simple as provided in trial.py.
I plan to build upon this in the coming weeks to facilitate all the required functions by the exercises.
(Click on the image for the video)