A week full of learning new things and researching
Discussion: Outcomes of next week
-
Check the ROS1 part of image viewer with usb can instead of current drivers to get away with green images.
-
Work on issues to complete the 3rd docker image of ROS1 + ROS2.
-
Refine the turtlebot2 support with ROS1 and ROS2. Check it’s compatibility.
-
Move ahead with the 3rd task and create a mini car is kinda tool to teleoperate turtlebot2
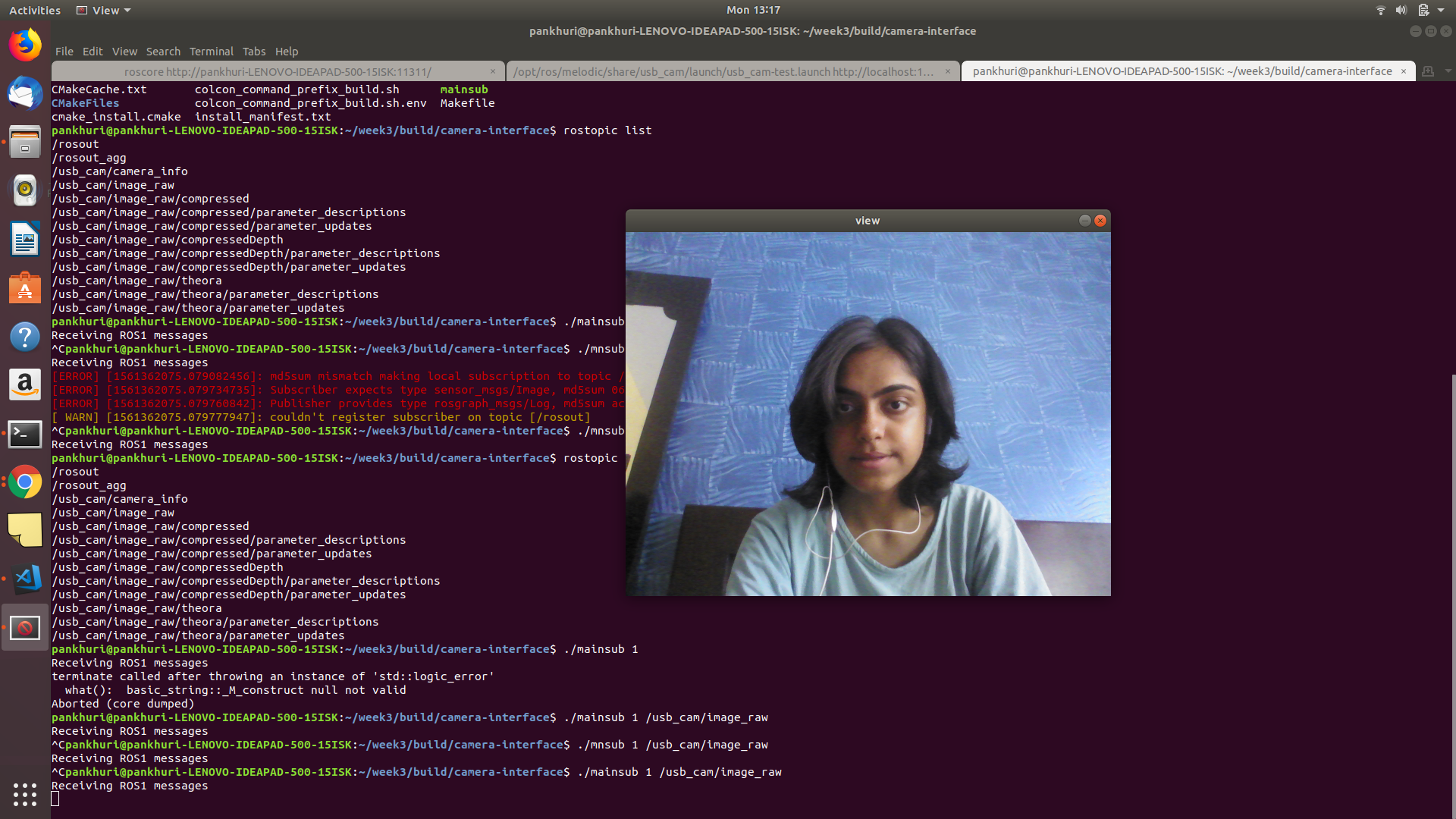
Corrected green background issue in image tool of ROS1
In the image tool developed last week I was getting errors of green background. Possible reason behind this was selection of wrong video driver. As suggested by the mentors instead of using mainpub publisher I used usb-cam driver for publishing images and the tool now worked well.
Updated Instructions for running with ROS1:
- In Terminal 1:
source /opt/ros/melodic/setup.bash
roscore
- In Terminal 2:```
source /opt/ros/melodic/setup.bash
rosrun usb_cam usb_cam_node /dev/video0
N.B. Check video device number in case it doesn’t work.
If you got error like
[mjpeg @ 0x56008efbd880] No JPEG data found in image
[ERROR] [1561362230.096677531]: Error while decoding frame.
Run it via roslaunch roslaunch usb_cam usb_cam-test.launch It will find and bring the correct video driver, so then publish via rosrun for testing.
Learn Docker properly
Last week task involved creating docker files for 3 different environment. But I had done several mistakes for ‘ROS1+ROS2 environment’and I was suggested to spend 2-3 days in learning concepts of docker very clearly as I might be needing it in later phases too.
So, I Did a Udemy course on Docker-mastery.
Runtime independency for C++ Interface
Discussion for achieving runtime independency for C++ with mentors. Keypoints of the discussion was:
” we install all the Built JdeRobot tools inside this docker image and user can then just run any publisher or subscriber inside this docker image. “
Solution 1 : Keep 2 builds, user need not compile themselves. They can just run the required build from the folder by script.
Issue: Corrected the dockerfile for both ROS1+ROS2 environment but while running the tool video driver not present in dockerfile.
Solution 2 : An independent python script which creates a single executable according to the selected choice by user via command line.
No need to :
-
Reach to each folder
-
Delete the previous builds/logs/cache
-
Source the environment
-
Worry about compile or runtime dependencies
A single user friendly script will do it all at runtime for C++ codes. So, in my opinion this would be better than other approaches.
Link to scripts : scripts-to-run-tool
runsub.py is our tool. For ROS1 I am publishing image via usb-cam driver and for ROS2 this is being done from the publisher driver built in initial weeks.
To run:
-
Start any image source(publisher)
-
python runsub.py
-
Enter 1 for ROS1 and 2 for ROS2
Please click on the image to watch the video how this very simple script works well.

Do we require docker here..? If not .. why not?
(to-be-discussed in meeting of the week)
Mini Carviz tool to teleoperate turtlebot2
Turtlebot2 and Kobuki drivers
turtlebot2 drivers are not yet developed in ROS2 Dashing. Link to discussion on ROS forum drivers
I further researched intro existing driver support for ROS2 Dashing.
None of the mobile robots are currently supported in Dashing
With further research into it I found MARA robot has drivers supported in both Melodic and Dashing.I am attaching the relevant links here: