This week I was updating exercise structure in the Robotics Academy repository, so that students can start using packages that were added as well use new API commands.
New packages
- map_server – to load map
- AMCL – for robot localization
- move_base – for local and global navigation
- cmd_vel_mux – velocity control multiplexer, so both teleop GUI and move_base can operate at the same time
Additionally, several config files are included in the main exercise folder. If neccessary, they can be updated right there.
API commands
self.client.sendGoalToClient(x, y)- to send goal to the move_base clientself.client.getResultFromClient()- to send get result from client. None if not reached the goalself.grid.getDestiny()- to get destination of the robot after double click on GUIself.path.getPath()- to obtain the path to the current goalself.liftDropExecute()- to lift or drop palletclearCostmaps()- to clear costmaps after moving with pallet
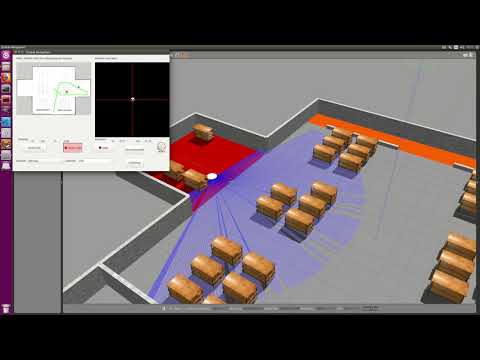
Solution using these commands is shown in the following video:
Further updates to the exercise
To make exercise more realistic, we have decided to add the following updates to the exercise:
- Add second robot which will autonomously navigate in the warehouse, so that our main robot will have to avoid dynamic obstacles.
- Generate pallets dynamically in the delivery zone, so that robot will have to pick them and deliver to the warehouse several times.
Further steps
I have found out how we can run shell commands in Python and spawn new objects in Gazebo world:
import os
os.system("rosrun gazebo_ros spawn_model -database coke_can -sdf -model coke_can3 -y 2.2 -x -0.3")
I just will have to spawn our pallets in the same way.
Additionally, dynamic_reconfigure package can be used in the same way if it will be required later.