Reinforcement Learning
Objectives
- Brief introduction to Reinforcement Learning
Introduction
As one of the main task in the project is to benchmark Deep Reinforcement Learning, with other approaches that are present in the Behavior Studio. In this post I will give a brief explanation about Reinforcement Learning .
Concepts
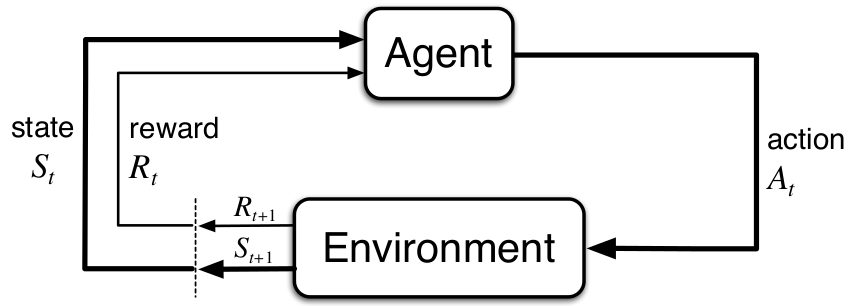
Markov Decision Process framework models mathematically the Reinforcement Learning problem which comprehends the interaction between agent and environment [4] [9].
Environment
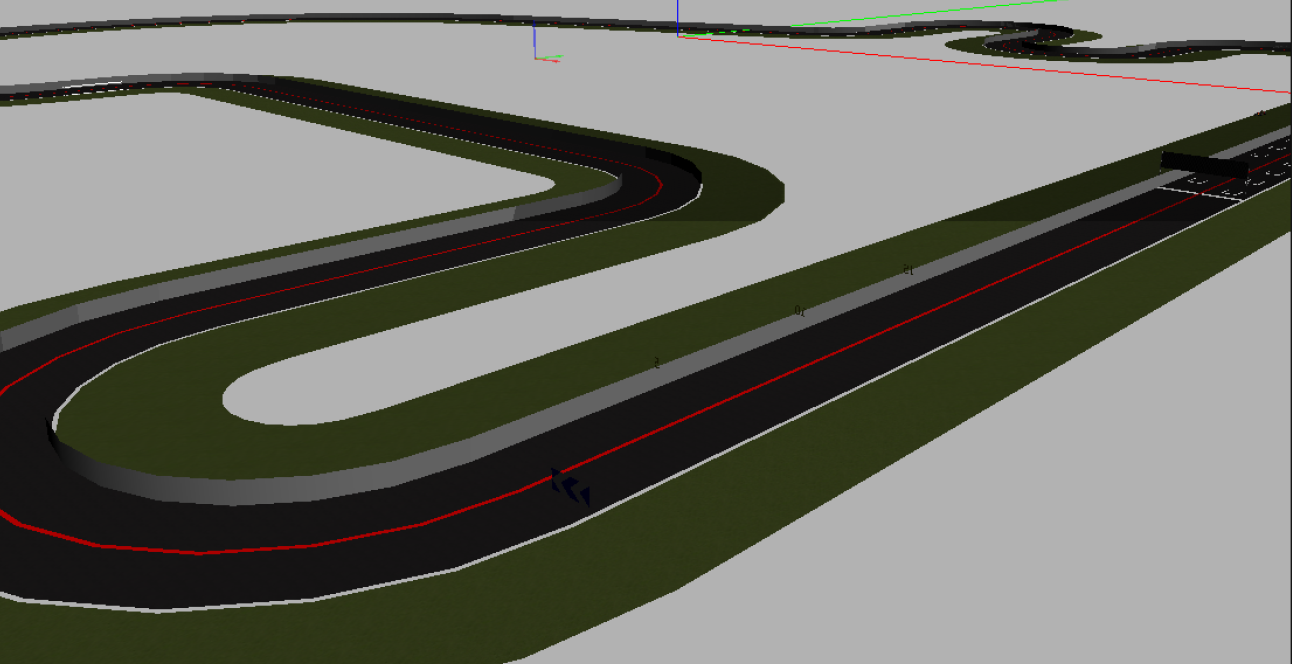
The environment in this project is the whole track, here the agent will act using a camera.
Agent
The agent would be the Formula 1 car, which will drive autonomously in the track following the red line.

Actions
In the project actions are going to be considered deterministic, for example an action would be a medium throttle and 30 degrees to the left, if the action space is too large it could take longer to find the right policies (the best action for each state).
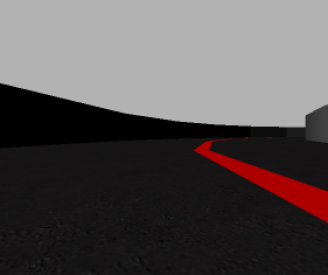
State
Given that we are going to use a camera as perception, the states would be the images from the camera which could appended in succession to give a sense of recurrence.
Reward
The reward signal $r$ is given by the environment after the agent has taken an action $a$ in a particular state $s$.
Episode
An episode starts from an initial state $s_{0}$ until a terminal state which in our case would be when the Formula 1 car leaves the lane.
Goals
The main goal of the reinforcement learning algorithms is to get the maximum discounted reward over an episode, also known as expected return denoted by $G_{t}$, the discount factor $\gamma, 0 \leq \gamma \leq 1$ controls the value of immediate rewards and long term rewards [4] [9].
\[G_{t}=\sum_{t=0}^{\infty} \gamma^{t} r_{t}\]References
[1] Medium, Simple Reinforcement Learning: Q-learning
[3] Deep Q-learning
[4] OpenAI Spinning Up, Intro to RL OpenAI
[6] Deepmind, Human-level control through deep reinforcement learning
[7] Deepmind, Playing Atari with Deep Reinforcement Learning
[8] B Ravi Kiran, et al. Deep RL for Autonomous Driving survey
[9] Andrew Barto and Richard S. Sutton, Reinforcement Learning: An introduction, MIT Press, 2018.