The User Manual of the software developed in the GSoC program.
Obstacle Avoidance Exercise
The link to the Github Repository
Installation
The following installs the software on your system.
Prerequisites
The libraries and exercises are developed and tested in Python 2.7.17, Pip 20.0.2, ROS Melodic, Ubuntu 18.04. The final commit was done on 31st August 2020.
Git
The instructions to install Git(command terminal) for Ubuntu 18.04 are:
-
Update the Default Packages
sudo apt update -
Install Git
sudo apt install git -
Check if the following command does not give a missing error
git
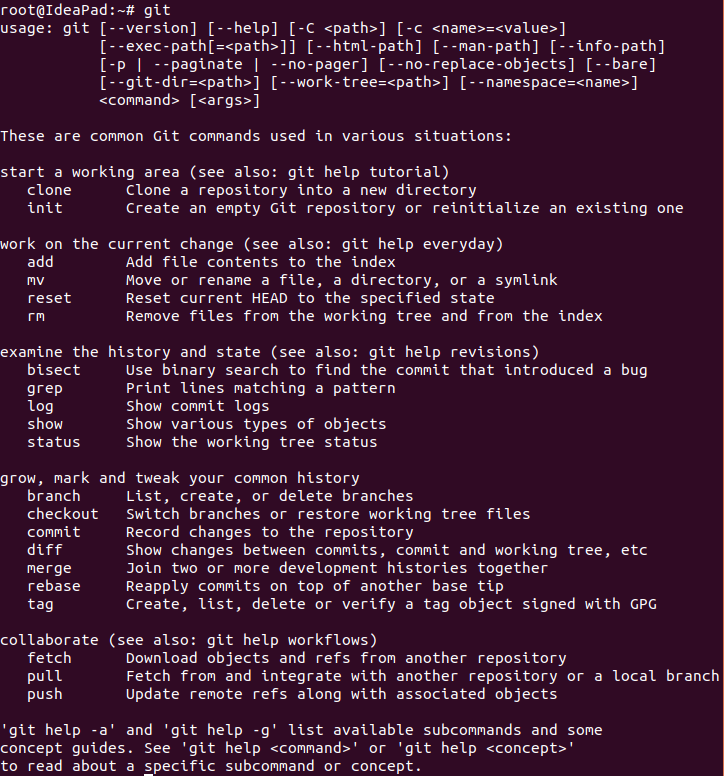
Successful installation
Python and Pip
The instructions to install Python2.7 for Ubuntu 18.04 are:
-
Update and Upgrade the Default Packages
sudo apt update sudo apt upgrade -
Install Python2.7
sudo apt install python2.7 -
To check correct installation, the following command should open a Python interpreter
python2 -
Install Pip for Python2
sudo apt install python-pip -
Check if the following command does not give a missing error
pip

Successful Installation
Generic Infrastructure of Robotics Academy
Follow the Installation instructions of Generic Infrastructre of Robotics Academy as given on the Robotics Academy webpage.
The installation is done correctly if we can successfully run the following commands:
-
Source the environment variables
source ~/.bashrc -
Start the ROS Master server. This would keep running in the terminal without giving any errors
roscore -
The Gazebo Model variable should contain paths to jderobot directories
echo $GAZEBO_MODEL_PATH
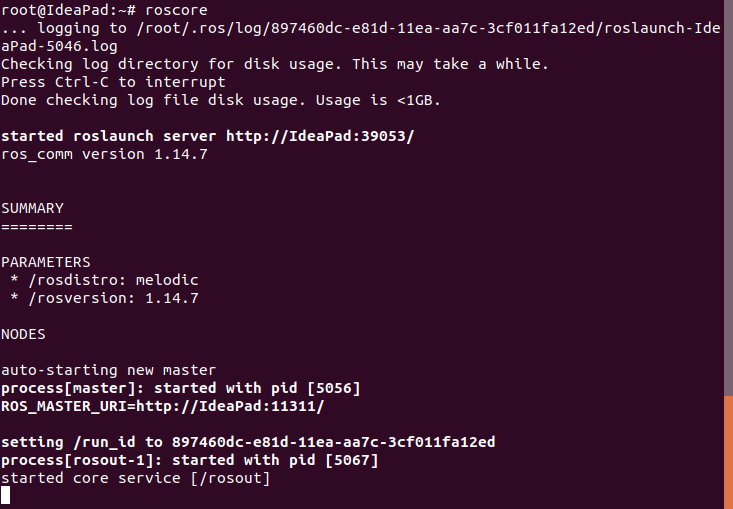
Succesfull installation
Dependencies
The project uses the following python modules
numpy==1.16.5
graphviz==0.14
matplotlib==2.1.0
These dependencies can be downloaded seperately or through the commands given ahead.
Libraries
The libraries developed for the project are available in libraries. These libraries are useful for solving the exercises. The API reference and examples are also provided.
Installation
Before running the installation, make sure that all the prerequisites are already installed on the system which are Git, Python, Pip and Generic Infrastructure of Robotics Academy.
-
Open a new terminal and navigate to the directory where the exercises should be downloaded.
-
Clone the Github Repository.
git clone https://github.com/TheRoboticsClub/colab-gsoc2020-Sakshay_Mahna -
Navigate to the working directory inside the cloned repository.
cd colab-gsoc2020-Sakshay_Mahna/evolutionary_robotics -
Update Pip to the latest version. Some dependencies need the latest version to install correctly.
pip install --upgrade pip -
Install the dependencies. All the dependencies would be installed without giving any errors.
pip install -r requirements.txt -
Source the ROS environment variables.
source /opt/ros/melodic/setup.bash -
Run the installation script to configure the Gazebo Assets. This will build the workspace and make new directories
develandbuildinsidecolab-gsoc2020-Sakshay_Mahna/catkin_wsdirectory.. installation.bash -
Run the source script to source the Gazebo Assets. This command would add new paths to
GAZEBO_MODEL_PATHenvironment variable.. source.bash
The application has now been installed.
Running the Exercise
Navigate to the obstacle avoidance exercise directory
cd colab-gsoc2020-Sakshay_Mahna/evolutionary_robotics/obstacle_avoidance
The current working directory will be changed.
Robot and it’s applications
Your Robot for this exercise
The robot used for this exercise is the Roomba. It has the following features:
-
Differential Drive, there are 2 motors that control the motion of the robot.
-
There are 8 infrared sensors around the body of the robot.
How to perform the exercise?
The student has to edit 3 different sections in MyAlgorithm.py file:
-
Enter the various parameters for the Genetic Algorithm
POPULATION_SIZE: The number of individuals in a generation.POPULATION_SIZE =NUMBER_OF_GENERATIONS: The number of generations to train the robot.NUMBER_OF_GENERATIONS =MUTATION_PROBABILITY: The probability by which a gene of the chromosome will be mutated(Randomly changed).MUTATION_PROBABILITY =EVALUATION_STEPS: The number of time steps for which each individual is going to be evaluated.EVALUATION_STEPS =
-
Enter the fitness function in the function
fitness_function. The function should return (integer/float) value of fitness. The following section Application Programming Interface describes each of the parameters of the function.def fitness_function(left_motor_speed, right_motor_speed, infrared): # Code the fitness function here fitness = 0 return fitness -
Enter the neural network specifications in the function
define_neural_network. The input and output layers have to be defined with the given parameters. The student may add additional hidden layers. Remark: Since, the robot we are using has 8 infrared sensors, therefore, ourinputLayerhas 8 neurons withIdentityActivation()andINFRAREDsensor input. TheoutputLayerhas 2 neurons(2 motors) withTanhActivation()and outputs toMOTORS.def define_neural_network(): # Define the layers # Layer(name_of_layer, number_of_neurons, activation_function, sensor_inputs, list_of_output_layer_names) inputLayer = Layer("inputLayer", 8, IdentityActivation(), "INFRARED", ["outputLayer"]) outputLayer = Layer("outputLayer", 2, TanhActivation(), "", ["MOTORS"]) # Define the neural network neural_network = ArtificialNeuralNetwork([inputLayer, outputLayer], "STATIC") return neural_network
Altering the code here influences the behaviour of our robot.
Application Programming Interface
-
For the specifics of setting the Neural Network, refer to this API reference, the API required to code the fitness function is discussed ahead
-
left_motor_speed: The speed of the left motor wheel of robot -
right_motor_speed: The speed of the right motor wheel of robot -
infrared: List of 8 infrared sensor values
How to run your solution?
-
Source the source script in this directory. This sources the various environment variables, just to avoid any problems!
. source.bash -
Launch the Gazebo simulation in the same terminal window. Ignore the yellow colored warnings that appear in the terminal. We should run always run the train file of the simulator, when we want to train the algorithm and test version when we want to test.
# Complete Simulation, only during testing roslaunch ./launch/test.launch # Headless version, only during training roslaunch ./launch/train.launch -
In a new terminal window, execute the academic application that will incorporate your code based on whether we want to train or test the robot. This would open a GUI application through which the user can execute the code.
# Only during training python2 ./train.py # Only during testing python2 ./test.py -
The training GUI has 2 buttons. The first button
Start Training, starts the training of the exercise from scratch. All the previous logs are deleted if this button is clicked. The second buttonResume Generationworks with the input box present alongside. It resumes the training from the specified generation, if the log file of that generation is present. Typically, generation numbers with multiples of 25 and the generation at which the user closed the training are available. Due to a bug, a button when clicked cannot be deselected. In order to select any other button, please close the GUI application, open it again and then select the button. -
The test GUI has a single button.
Test Best Chromosometests the best chromosome that was found in the previous trainings. It also works with the input box.
Training Illustration
Resume Illustration
Test Illustration