Week 4
in Blog
GSOC Coding Week 4 Progress Report
This week I started by improving the connection protocol over drone exercises(issue #1021). The issue was manager.py was not waiting for launch.py to finish launching the Gazebo, PX4 SITL, MAVROS in order. So, I have added a temporary text file status.txt to solve this. As soon as MAVROS is launched, a new file will be created writing done. Until the status.txt is created, manager.py will keep on checking for the file every 2 seconds.
The connection protocol for multi-drone exercises(addressed in issue #1061) is still unsolved. However, listener actuator_armed -i <topic-instance> can be used to listen on uORB topics and print the data to the console (more info: listener). The default topic instance is 0. Multi-vehicle simulations use a separate remote port for each instance, allocated sequentially (more info: mavlink-udp-ports). This needs further discussion and can be used to solve the issue.
This week I also migrated the remaining 3 drone exercises from ROS-node to Web-template based.
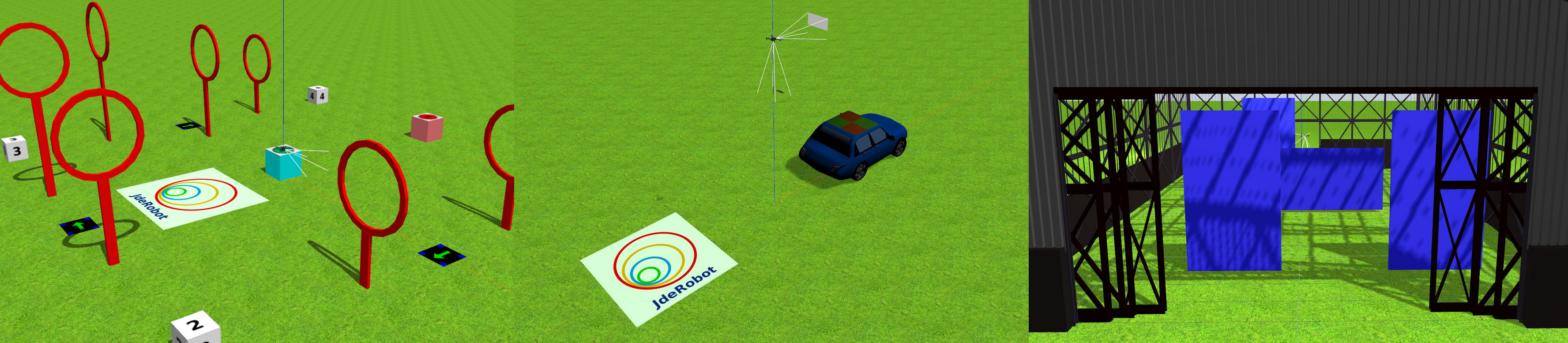
- Drone Gymkhana: The goal of this exercise is to learn how to control a drone to complete a gymkhana course, composed of several waypoints that you’ll have to navigate through.
- Drone Hangar: The goal of this exercise is to implement the logic that allows a quadrotor to escape a hangar filled with moving obstacles.
- Visual Lander: The goal of this exercise is to implement the logic that allows a quadrotor to visualize a beacon and land on it.