Week 6
Connecting the exercise
Pull Request
We had our project evaluation this week, and I had to make a pull request from my local branch to JdeRobot’s master branch in order to do so. To finish this process, I first removed all of the redundant files that had been generated after executing the rsync command from my local branch.
Commit : Removed the redundant exercises
After this, I created a draft pull request in Robotics Academy repository for the pick and place exercise.
Machine Vision
Since my classes are going to get started by the end of July, I started working on to the next exercise which is “Machine Vision”. The first stage was to create the code for simulation of Machine Vision exercise. I addressed portions of the documentation with Yijia in the weekly meet that I didn’t understand (for example, the radius used in shape filter and how to pick rgb range for the exercise). I developed an example code for conducting machine vision exercises after clarifying all of my doubts.
The object_color_filter and object shape filter were both working fine, and the underlying pcl filter recognised the objects correctly. The results are depicted in the diagram below:
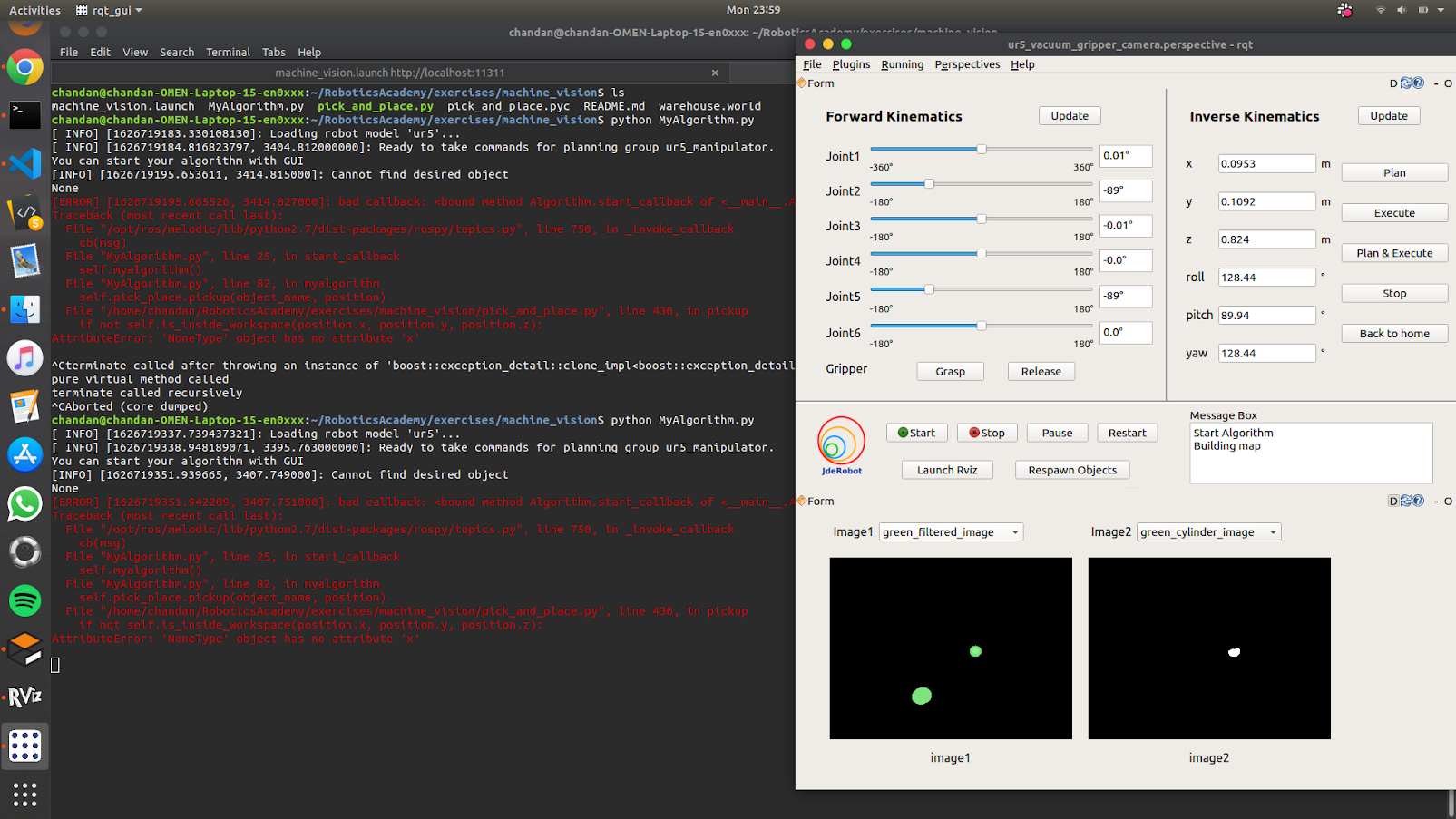
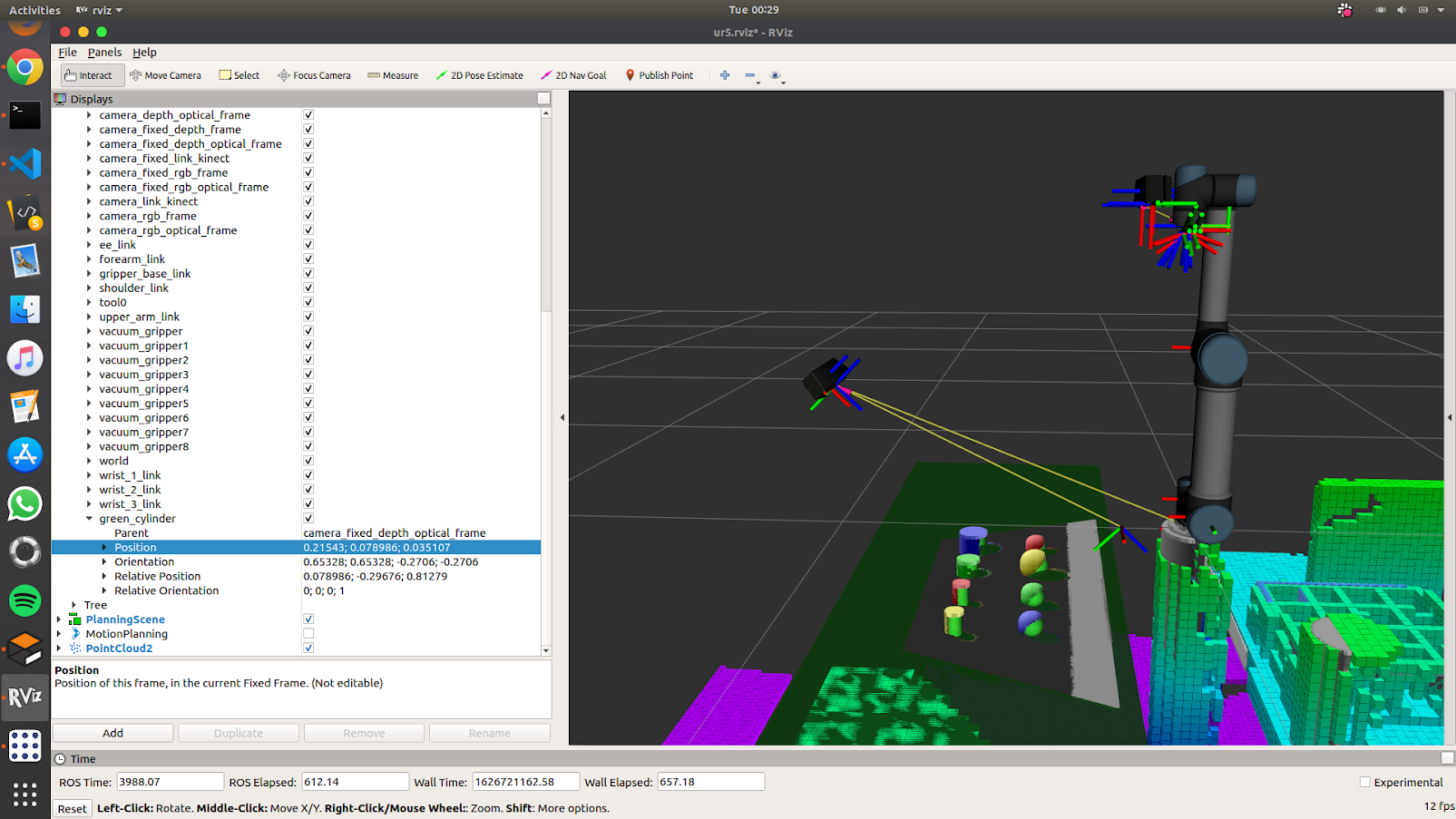
The robot arm, however, was unable to pick up the objects and throws up the error: AttributeError : 'NoneType' object has no attribute 'x'. Following further investigation, I discovered that the location of the item identified in the tf frame was incorrect, as seen in the figure below:
Final Review
I created the final contributions of the pick and place exercise’s pull request after discussing some of the needed adjustments with my mentors.
Final Pull Request: https://github.com/JdeRobot/RoboticsAcademy/pull/1153