Week 8
Cob Scan Unifier/LibGazebo ROS moveit planning scene
COB Scan Unifier
The cob_driver stack includes packages that provide access to the Care-O-bot hardware through ROS messages, services and actions. E.g. for mobile base, arm, camera sensors, laser scanners, etc. However, terminal shows up with error Cannot locate node of type [scan_unifier_node] in package [cob_scan_unifier]. Make sure file exists in package path and permission is set to executable (chmod +x). This reason behind this error according to this post is sourcing. But since each command runs a separate sub-shell, so the environment variables are not preserved and .bashrc is not sourced. Related stackoverflow answer.
LibGazebo ROS Moveit Planning Scene
Terminal shows up an error Failed to load plugin libgazebo_ros_moveit_planning_scene.so: libgazebo_ros_moveit_planning_scene.so: cannot open shared object file: No such file or director. This clearly states that the mentioned plugin isn’t avalialble. However, the identical plugin isn’t even installed on my local PC, and the exercise runs smoothly there. Furthermore, there is no information about this plugin on the internet.
Testing Machine Vision Exercise
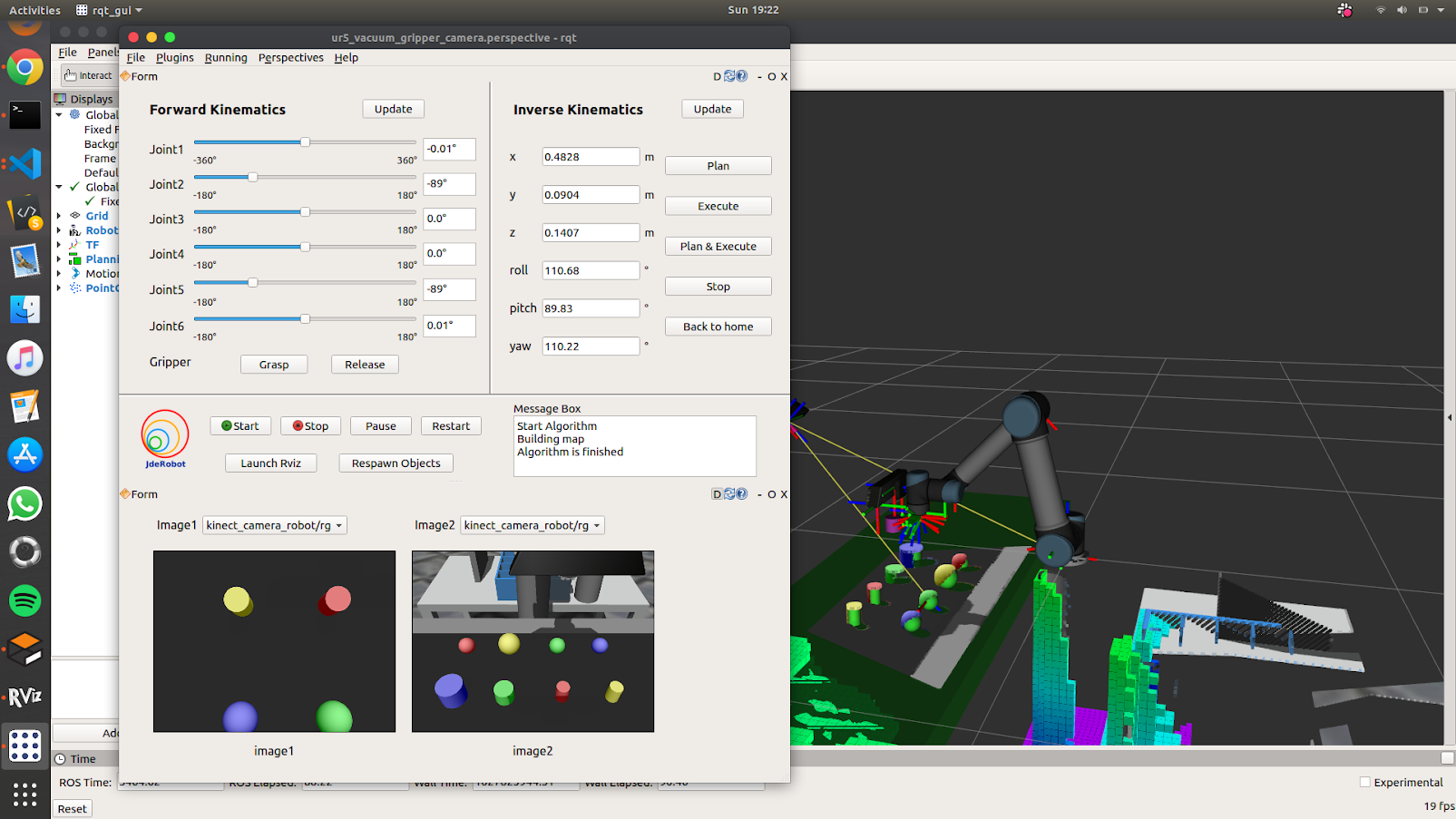
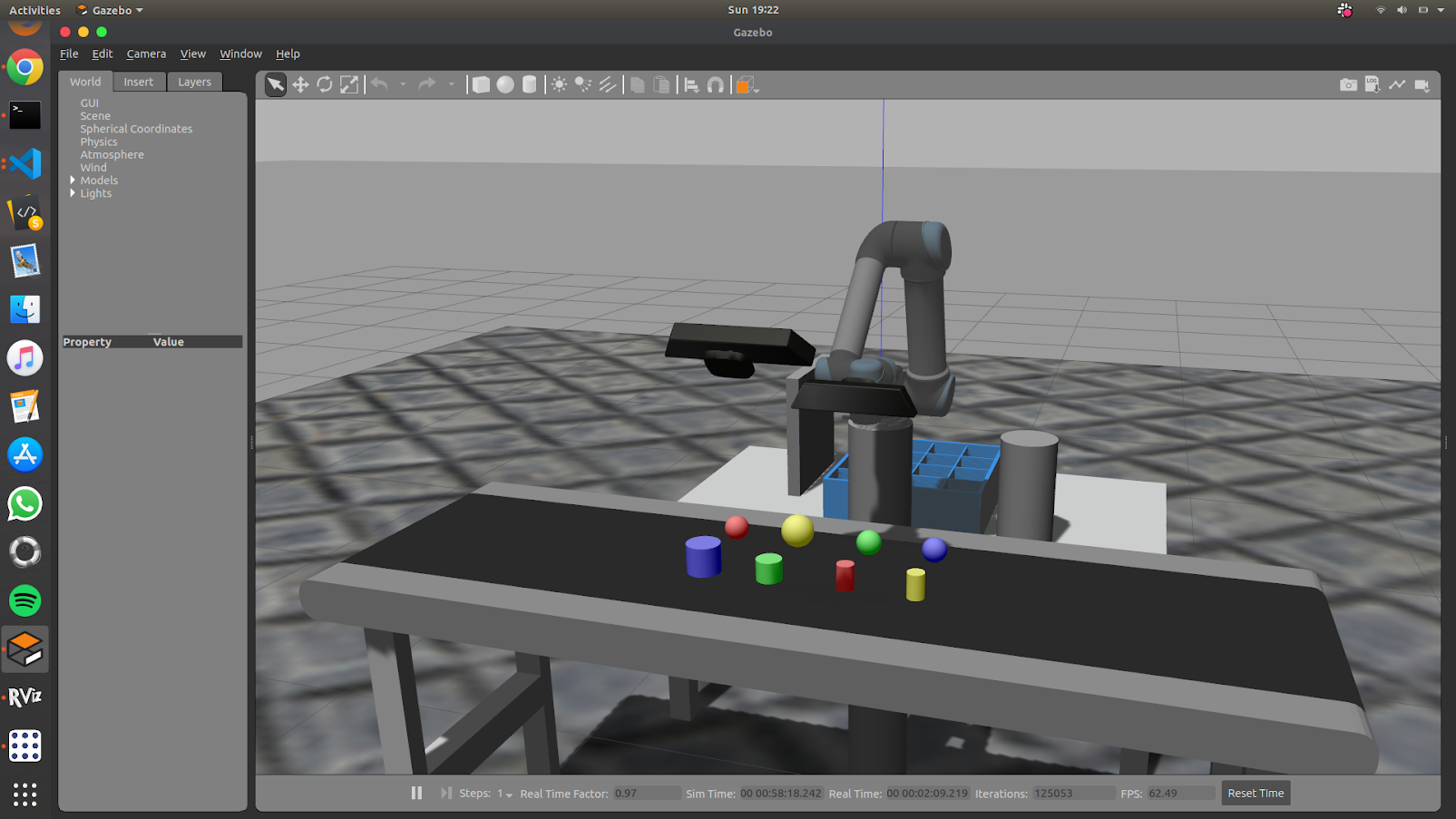
The most difficult aspect of this exercise (Machine Vision) is using the Vaccum Gipper to pick up the items. Yijia assisted me in locating the object and carrying out the pick procedure. However, it is still unable to correctly pick the items. I tried adjusting the WIDTH value, but it still doesn’t seem to be picking up the objects correctly. I’ll keep tweaking the parameters till the simulation works as a goal for next week.
Issues and Pull Request
We discussed integrating the pick and place exercise into the Robotics Academy repository during our weekly meeting. But, it seems that a separate pull request is required for integrating Rivz with the exercise, which will make developing new exercises with Rviz capabilities easier. However, because Rviz was already integrated into the Pick and Place exercise, it would be a time-consuming and inefficient task to first de-integrate Rviz from Pick and Place, make a pull request, and then create a pull request incorporating Rviz into the exercises. So, after debating this during the meet, we decided to migrate the Machine Vision exercise without Rviz first, and then add Rviz with a new pull request later.
Mobile Manipulation
Issue: #1205 Pull Request: #1206