
Week 4
Issues Created
- #5: Create a base template for ROS2 RADI; related to #796
- #1045: VirtualGL Error: curl: (22) The requested URL returned error: 404 Not Found
Issues Solved
- Created the base template (Demo below). Code on my fork’s branch “issue-796”
- #1046: Updated url & version of VirtualGL in Dockerfile-2.4.base; solves #1045
- #1047: Updated url and version of VirtualGL in Dockerfile-noetic-3.1; solves #1045
Progress on the Issue
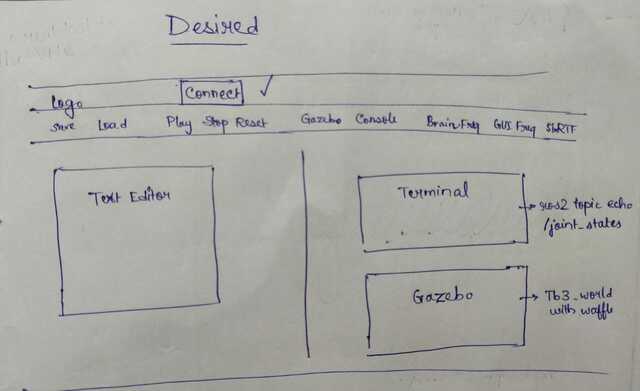
Desired Baseline Features of the Test Exercise
Demonstrations
Initial demo of ROS2 Foxy RADI with tb3_teleop exercise
Final demo inside the Turtlebot3 World Environment
(The missing blue scan lines occasionally appear and sometimes don’t in a new run. Mysterious at the moment. Hope to find some inroads to solve it)
Steps to replicate
Pushed the changes!!
The Foxy RADI demo is ready
git clone https://github.com/trunc8/RoboticsAcademy.git
cd RoboticsAcademy/scripts
git checkout issue-796
./build.sh
docker run -it \
--rm \
-v /tmp/.X11-unix:/tmp/.X11-unix \
--name foxy_radi_container \
-v $PWD/../:/RoboticsAcademy \
-p 8000:8000 -p 2303:2303 -p 1905:1905 -p 8765:8765 -p 6080:6080 -p 1108:1108 \
foxy-radi ./start.sh
- Click the Django server URL presented
- Press “Connect”
- After successful connection, press the “Gazebo” button
- The Turtlebot3 world and the bot should be visible
- Press the “Console” button and run
ros2 run turtlebot3_teleop teleop_keyboardto teleoperate the bot
Observations and Design Decisions
Cross-referencing my other blogs —
- Solving a mystery and discovering good practices in the process:
Why ~/.bashrc is not allowed to be sourced inside ./start.sh - Making a flowchart of the Existing Websocket Architecture Design
- More design decisions inside my Roughwork Notes