
Week 5
Issues Created
- #6: Create an RViz2 web template for ROS2 RADI; related to #801
- #7: Split Foxy Dockerfile into base Dockerfile and wrapper Dockerfile
Issues Solved
- #1074: new RADI-4.0.0 for ROS2; solves #5, #7 and #796
- Created the RViz template (Demo below). Code on my fork’s branch “issue-801”
Progress on the Issues
- Please find in the Week 4 blog, the progress and demo for Pull Request #1074 (solving Issue #5)
- Progress on #6 below
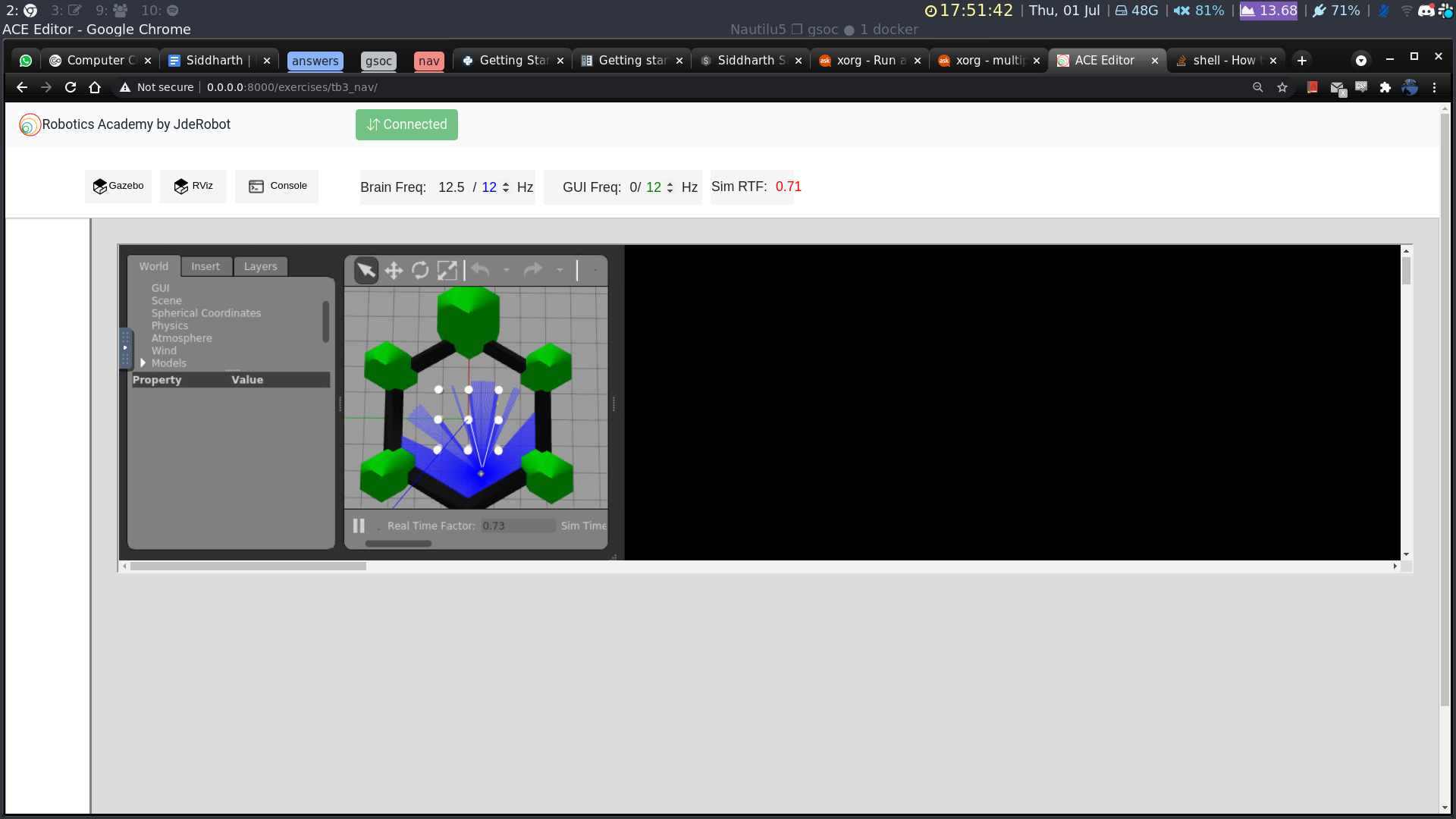
Working on Rviz2 Template
Added a responsive RViz button and iframe to the web-template
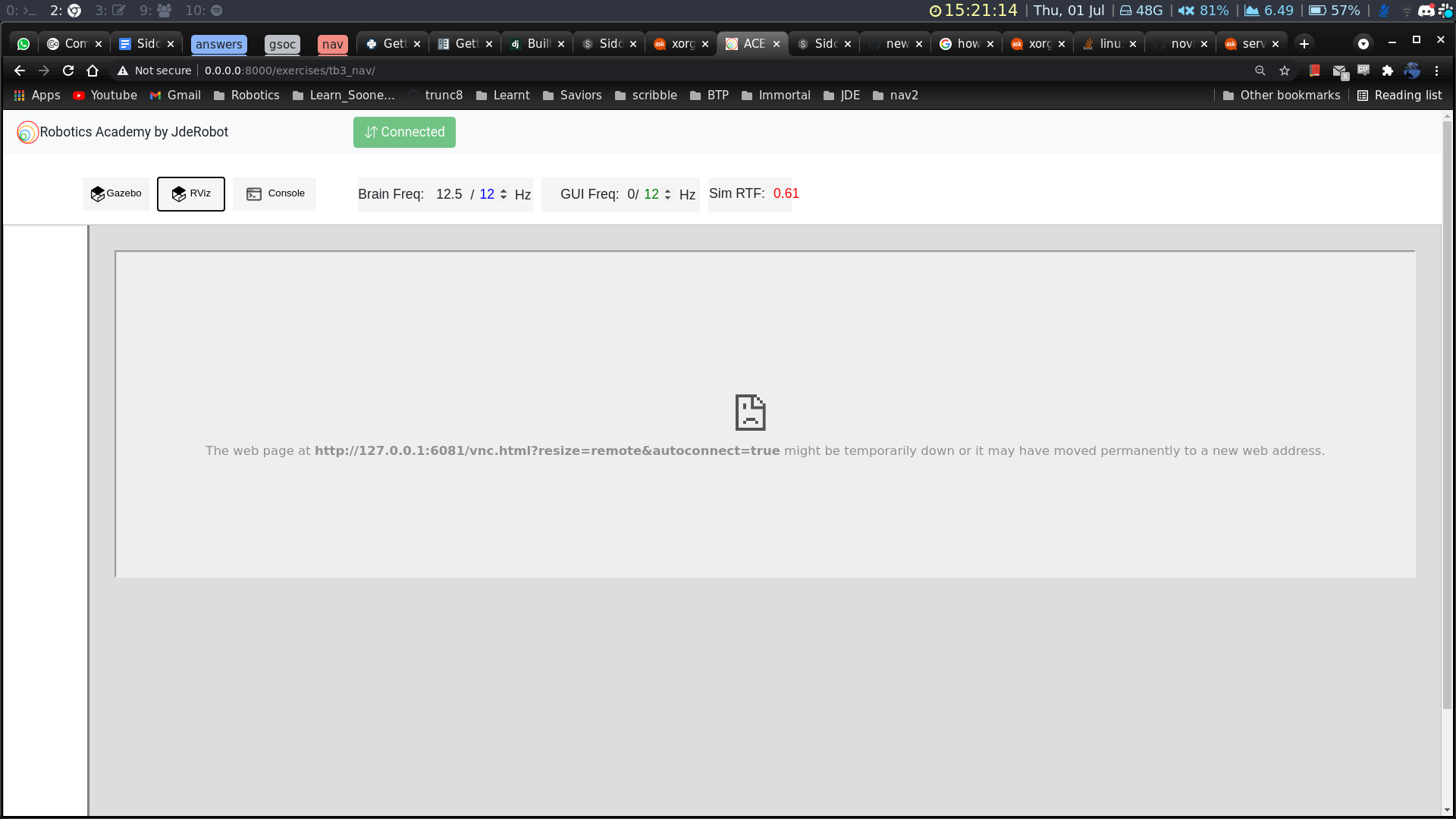
- The error message is intentional as no VNC server has been connected to port 6081
- On changing the websocket port to 6080 (external port corresponding to Gazebo), the gzclient successfully connected to the RViz frame. This is expected behavior.
Connected to all 3 iframes successfully (Console + Gazebo + RViz)
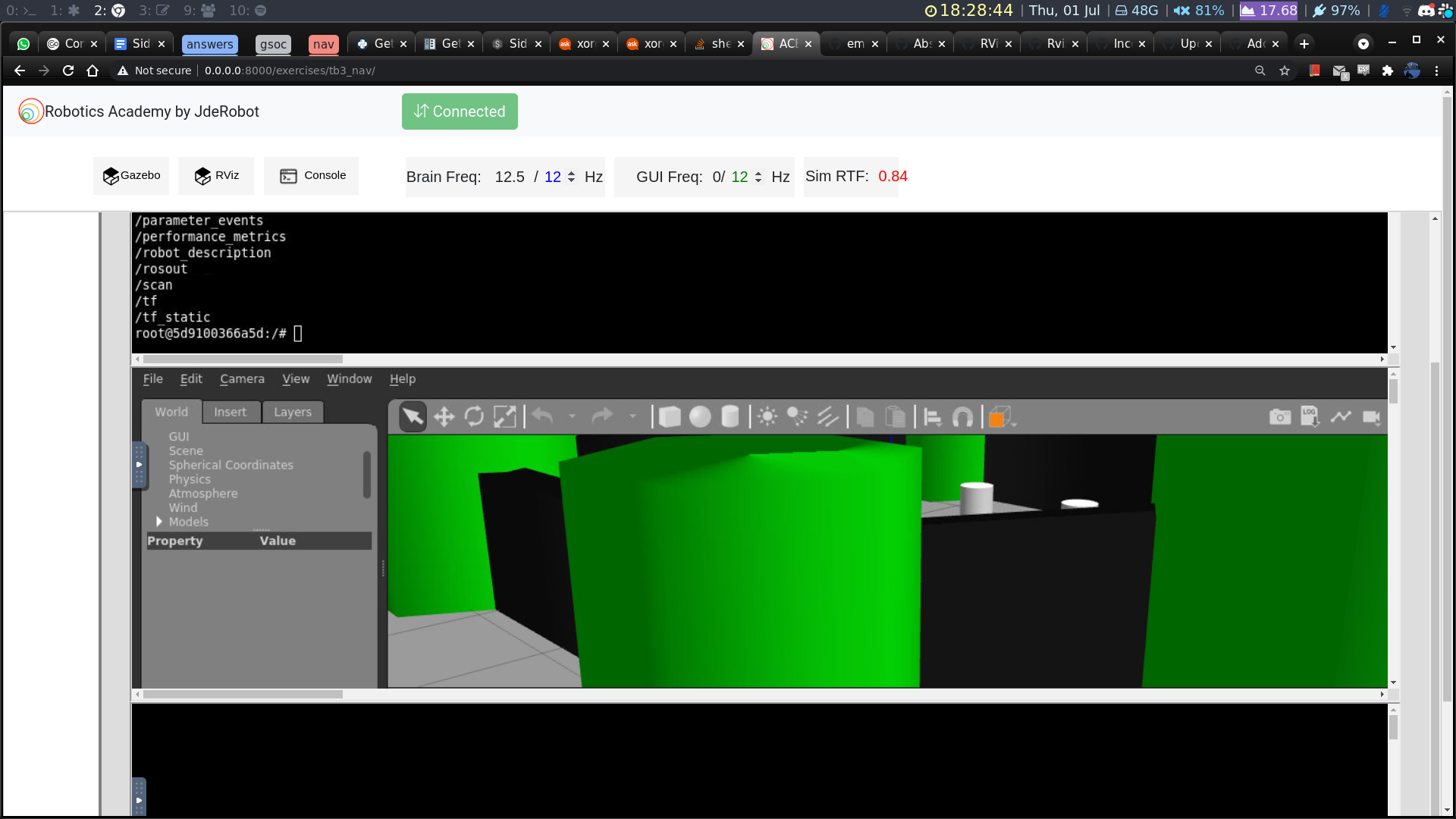
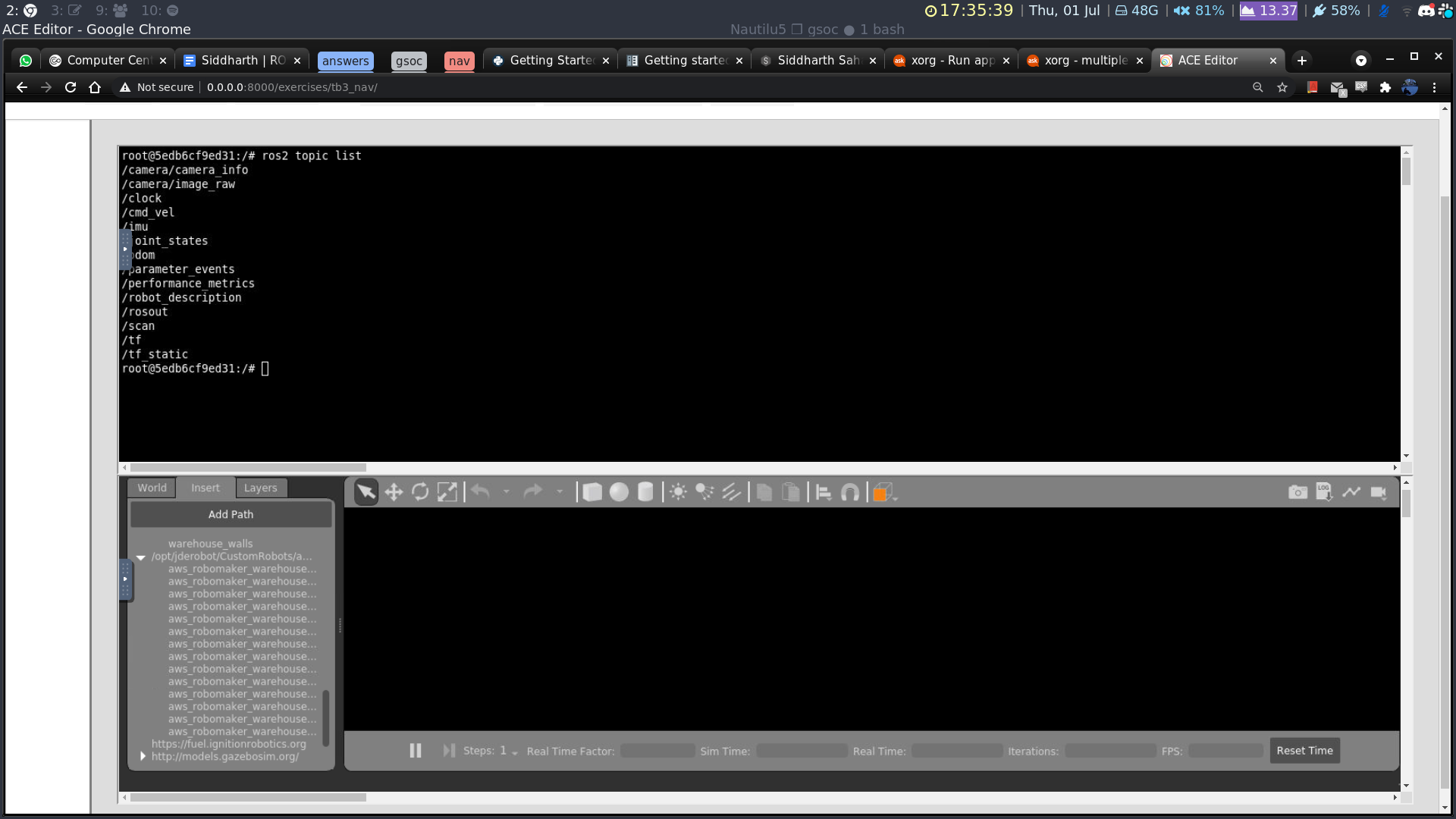
Spawned Gzclient from the terminal
- Prevented the gzclient to spawn along with the
ros2 launchcommand - Executed command in terminal (visible above) and successfully attached to the Gazebo iframe from the terminal
- DISPLAY:=0 is the xserver display to which the Gazebo iframe is attached
Spawned cartographer in RViz from the terminal
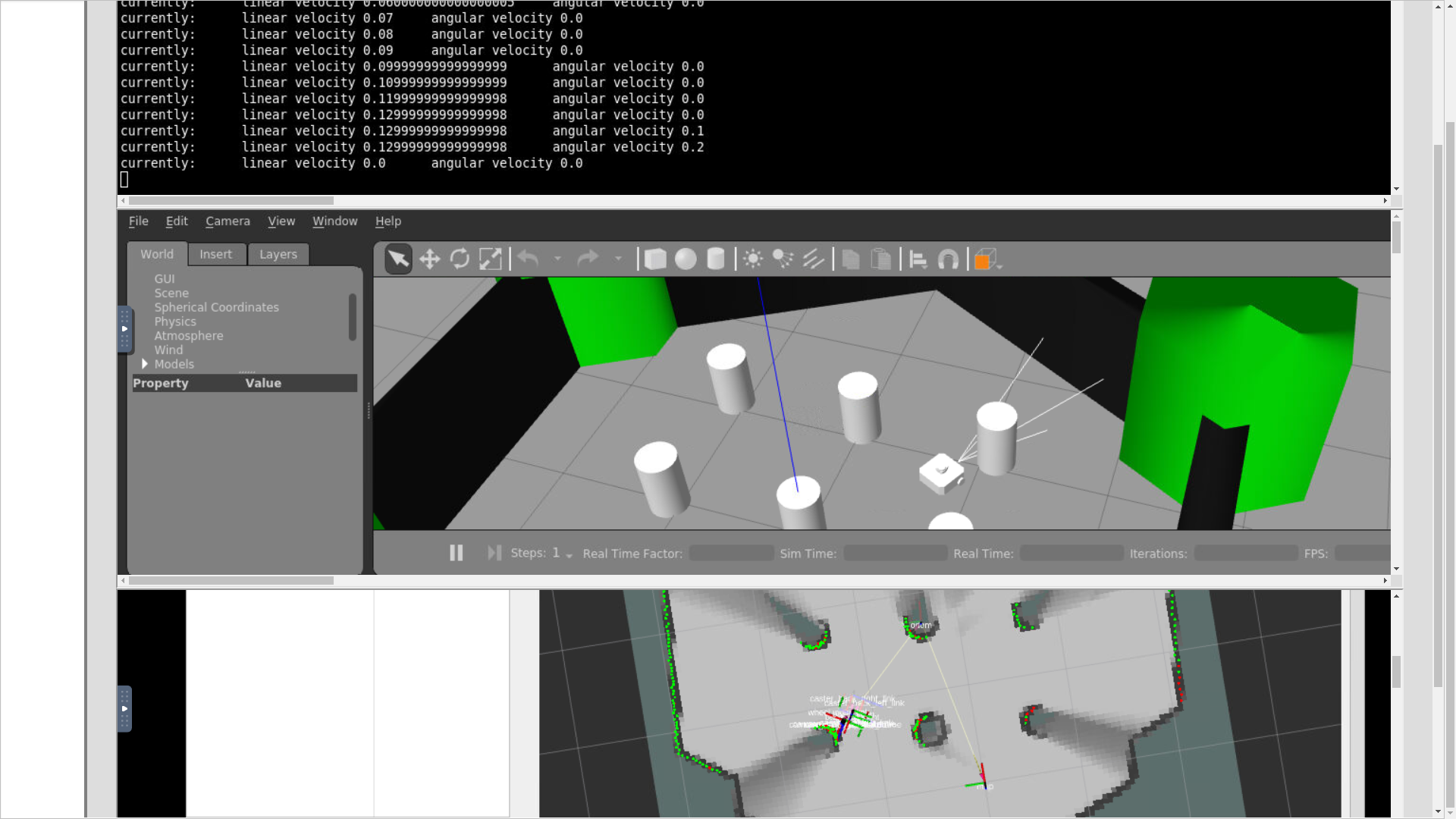
- Using command
DISPLAY=:2 ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True - Teleoperated the bot and verified that the map was being built
- DISPLAY:=2 is the xserver display to which the RViz iframe is attached
Manipulating Gazebo’s gui.ini from manager.py
100px*100px Gazebo window
Corresponding gui.ini
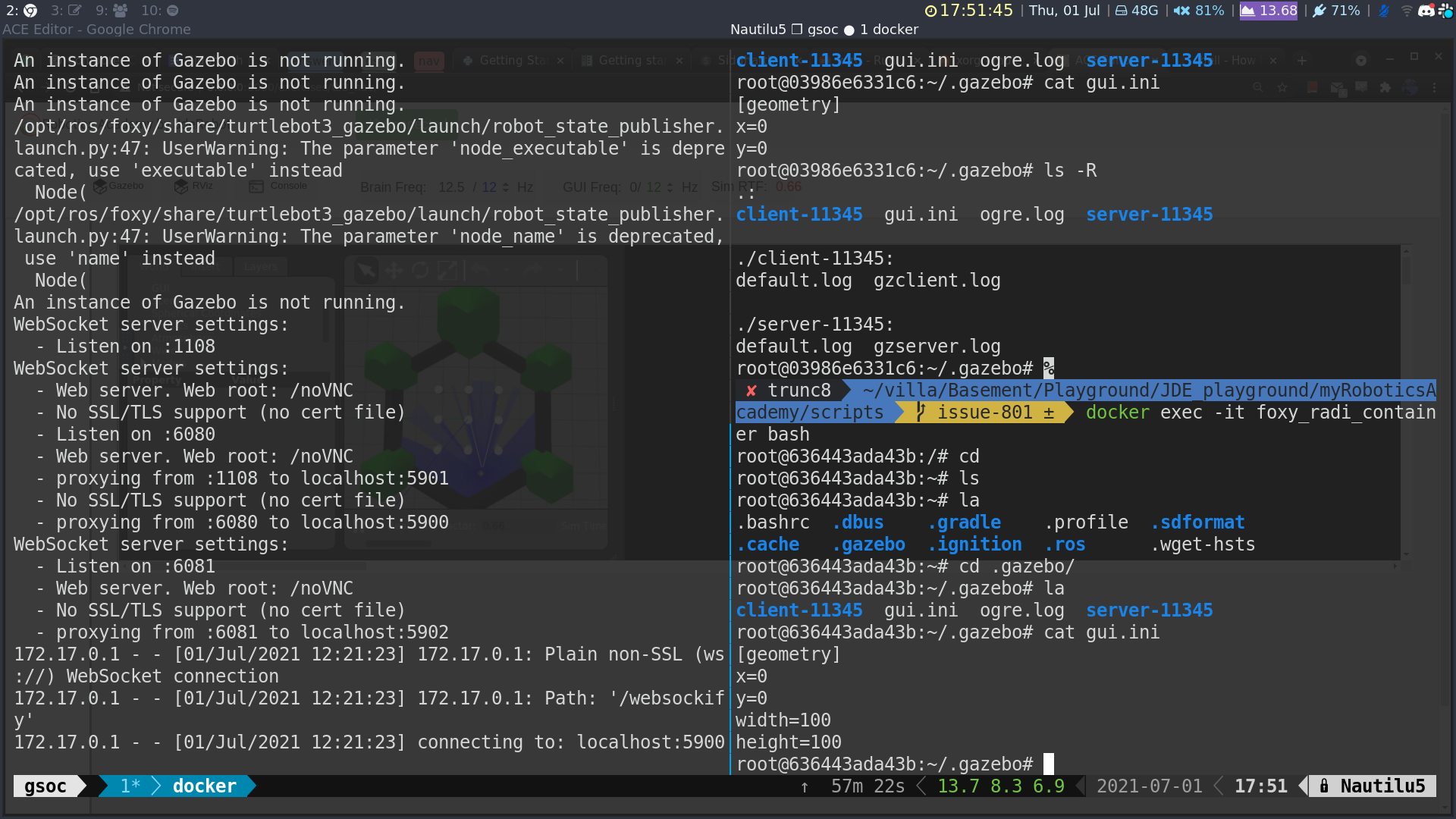
- The gui.ini contents are visible in the lower right
- These were populated programmatically from
manager-4.0.py
Gazebo Quirks
Readings, Observations and Design Decisions
Links to my other blogs