
Week 6
Issues Solved
Progress on the Issue
- Last week’s progress on the RViz2 template can be seen in the Week 5 blog
Finishing up with RViz2 Web Template
Added RViz2 VNC in accelerated simulation mode
Completed!
Demonstration
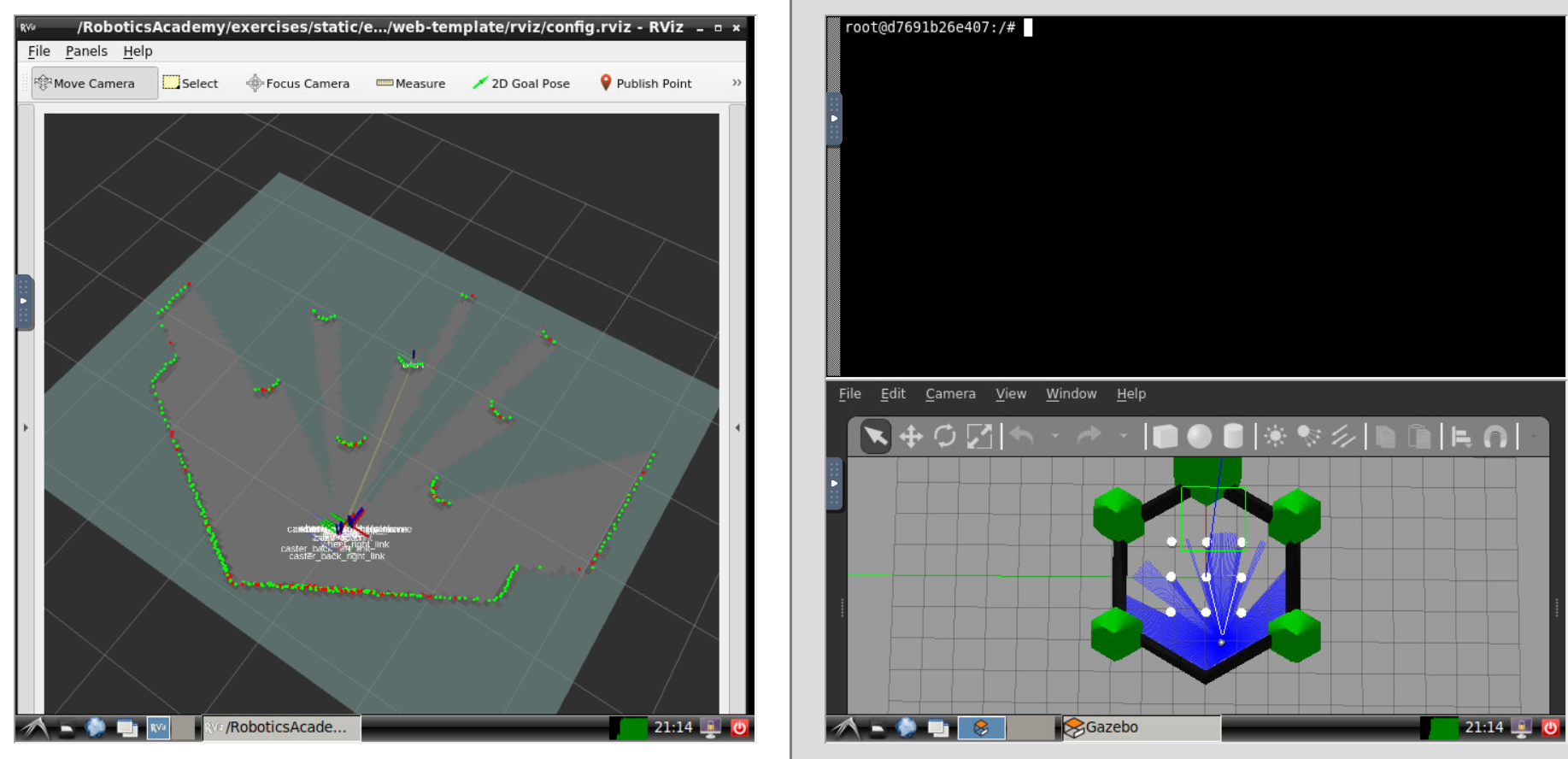
Demo of RViz2 Template in RADI 4.1.0 with map building using cartographer
Steps to replicate
git clone https://github.com/trunc8/RoboticsAcademy.git
cd RoboticsAcademy/scripts
git checkout issue-801
./build.sh
docker run -it \
--rm \
-v /tmp/.X11-unix:/tmp/.X11-unix \
--name foxy_radi_container \
-v $PWD/../:/RoboticsAcademy \
-p 8000:8000 -p 2303:2303 -p 1905:1905 -p 8765:8765 -p 6080:6080 -p 6081:6081 -p 1108:1108 \
foxy-radi ./start.sh
- Click the Django server URL presented
- Click the Turtlebot3 Map Building exercise
- Press “Connect”
- After successful connection, press the “Rviz” button followed by the “Gazebo” button
- RViz, the Turtlebot3 world and the bot should be visible
- Press the “Console” button and run
ros2 run turtlebot3_teleop teleop_keyboardto teleoperate the bot