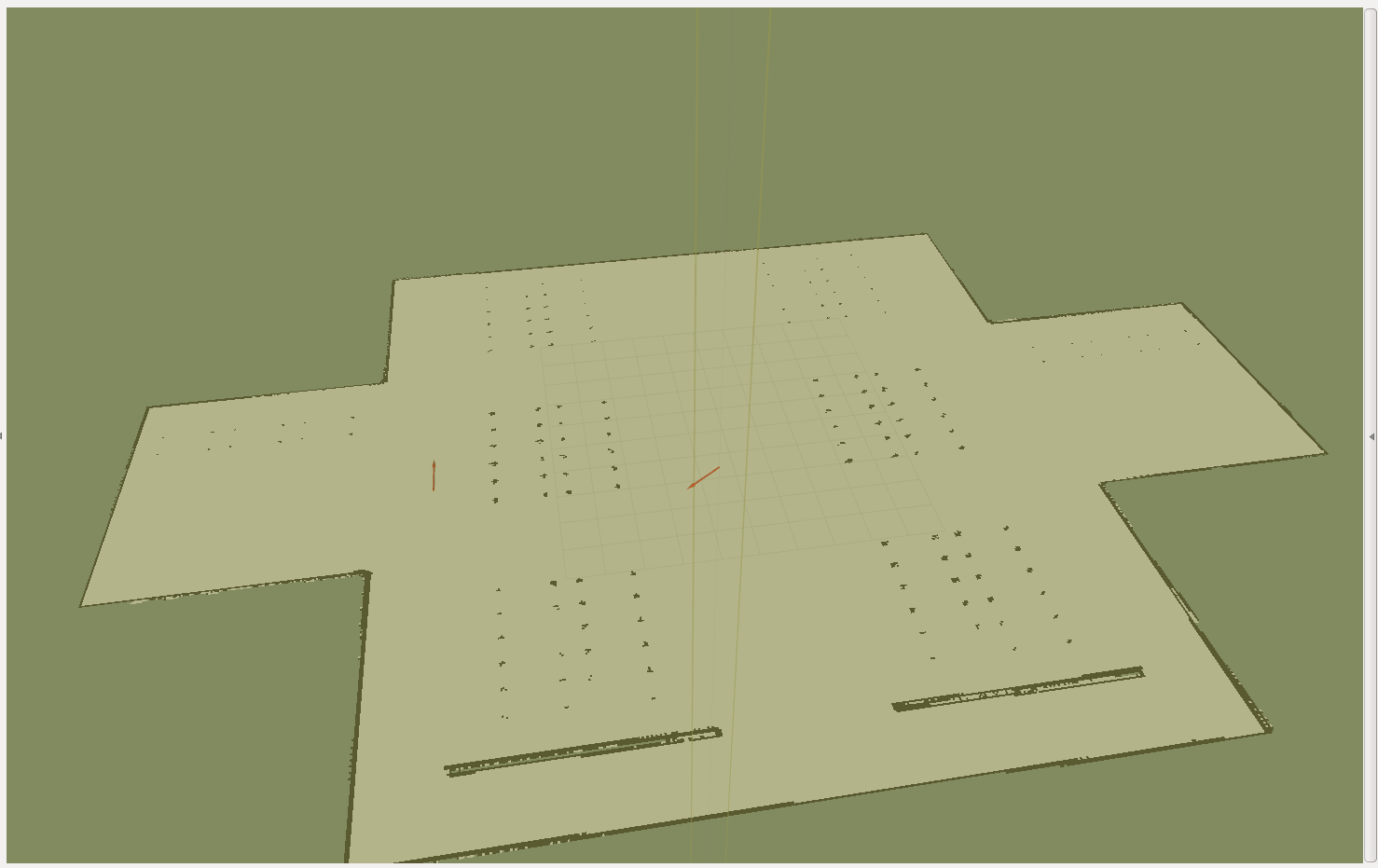
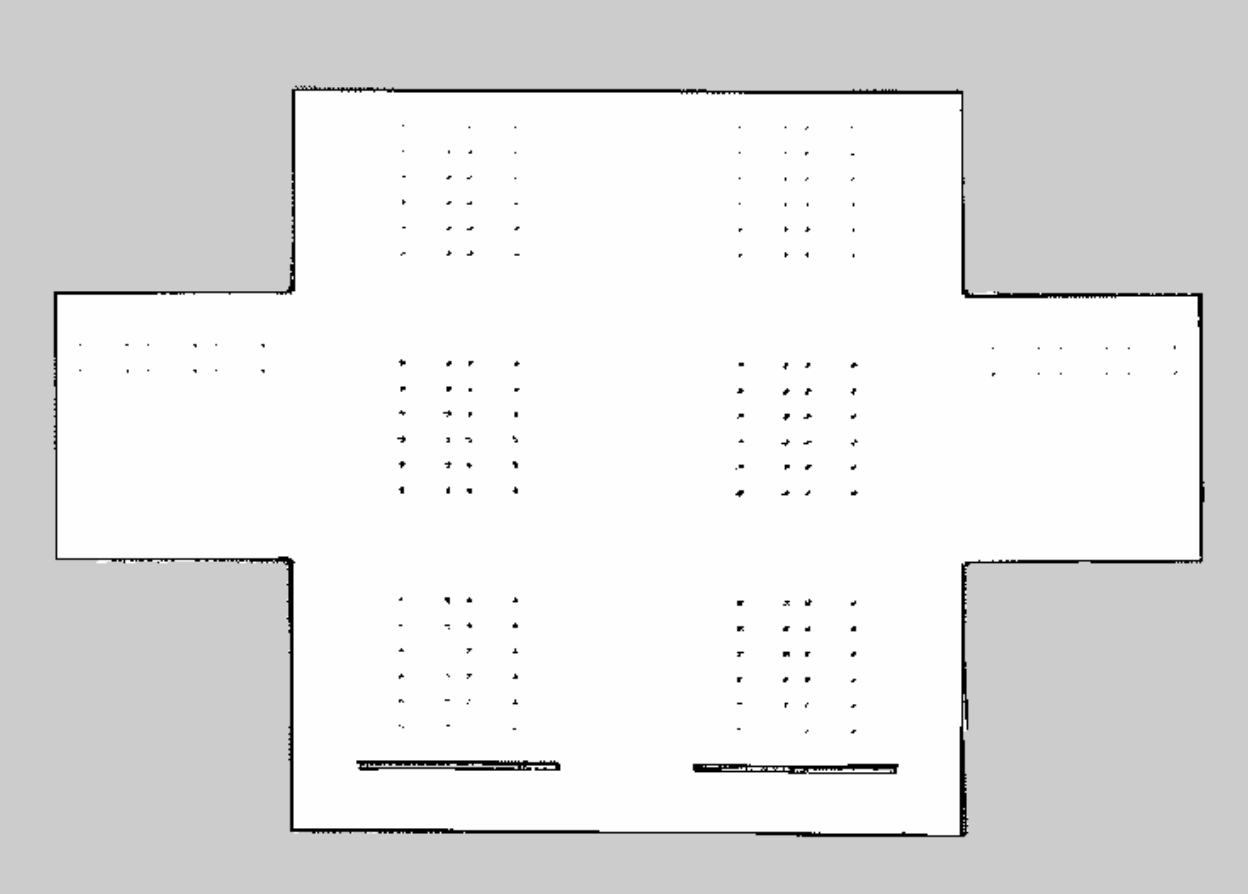
Mapping finished
After some try and tests with different configurations and variables I was finally able to do the gmapping properly. Additionally, I have recorded a rosbag file which should be useful later for remapping.
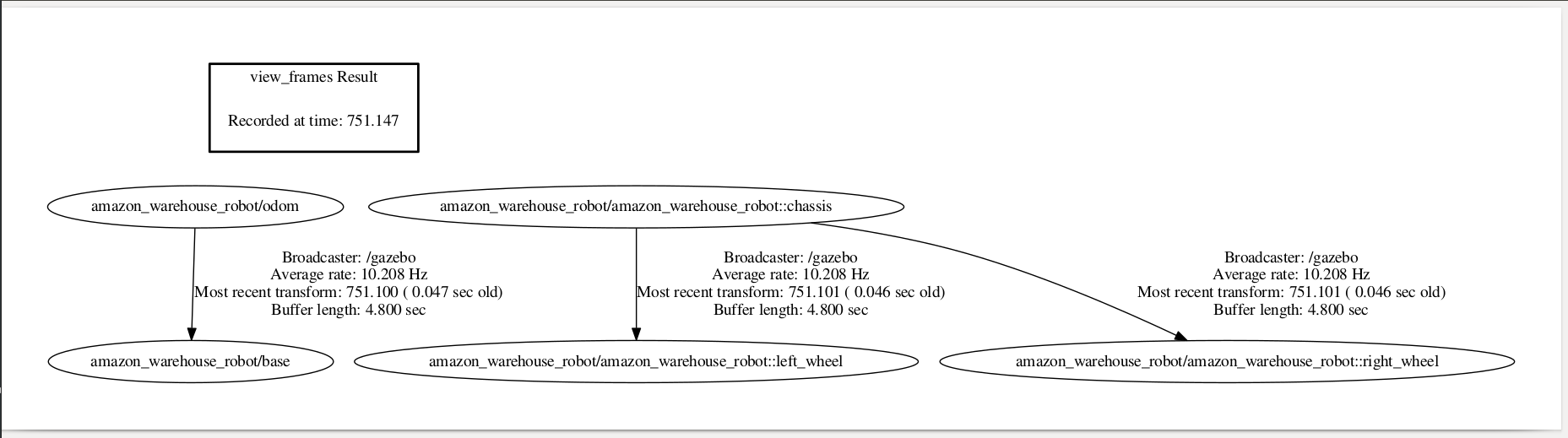
Transformation tree updates
As I have mentioned previously, there are some issues with the launching the amcl node. As I have searched and found out later most of them were related to structure of the robot, and particularly it’s transformation tree. Basically, it firstly looked like this:
Therefore, I addded a few transformations to the base launch file, to strucuturize it, so it became this:
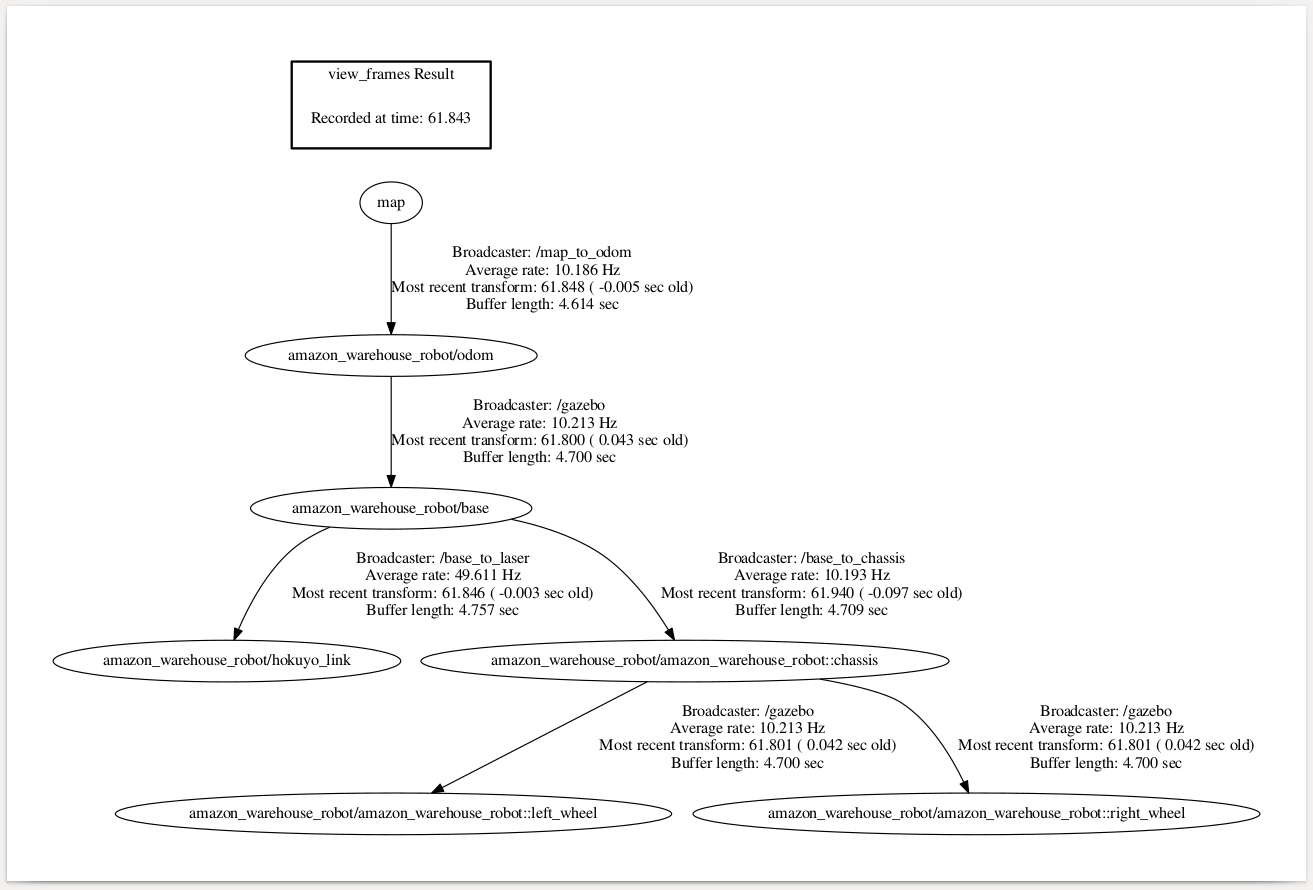
Note: Right now transformations are not correct, they were introduced mainly to make additional packages work.
Further steps
So far, we have a complete map of the warehouse, robot location and odometry to feed into Navigation Stack, but there is an issue that I’m not able to solve. I tried to feed the laser, odometry, and base data to the amcl node from amcl package, but keep getting the following error:
[ WARN] [1560363206.079364324, 3086.873000000]: No laser scan received (and thus no pose updates have been published) for 3086.873000 seconds. Verify that data is being published on the /amazon_warehouse_robot/laser/scan topic.
[ WARN] [1560363206.146625004, 3086.938000000]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.amcl.message_notifier] rosconsole logger to DEBUG for more information.
But actually /amazon_warehouse_robot/laser/scan, /amazon_warehouse_robot/odom topics are working properly. I have researched through the answers.ros.org and tried different solutions, but none of them helped.
Will work on it more.
Status quo
Right now, RViz already can vizualize quite useful information. Firstly, map_server node publishes /map topic. Secondly, odometry is working right on the map. Finally, destination point with orientation can be easily published there. You can see how it looks below: