Prakarsh is currently a senior at Ajay Kumar Garg Engineering College, pursuing Electronics and Instrumentation Engineering as his major. His research interests include Reinforcement Learning, Deep Learning, Autonomous Systems, and Embodied AI.
Prakarsh is currently a senior at Ajay Kumar Garg Engineering College, pursuing Electronics and Instrumentation Engineering as his major. His research interests include Reinforcement Learning, Deep Learning, Autonomous Systems, and Embodied AI.
Week 1-coding begins
Week 1
After discussing with the mentors and fixing the tentative timeline, I started working on the build error in this post.
How did I contributed in this week?
The vey first thing was solving the rotorS build error. It was solved through fixing dependencies issue of mavlink and mavcomm package. After getting the rotorS simulator package built from the following github repo for ros-noetic. I tried testing it out on my system. But after running the following launch file through:
roslaunch rotors_gazebo mav_hovering_example.launch mav_name:=firefly world_name:=basic
I faced another issue at the door:
**To solve this issue, I looked into various forums and repos and found a possible replacement or an extension for the rotorS in the form of CrazyS. CrazyS is an extension of the ROS package RotorS, aimed to modeling, developing and integrating the Crazyflie 2.0 nano-quadcopter in the physics based simulation environment Gazebo. **
- Building the ros-noetic packages available in this repos for rotorS solved the issue and we have a clear path. Here’s the drone hovering with rotorS sim and yeah also a drone swarm:
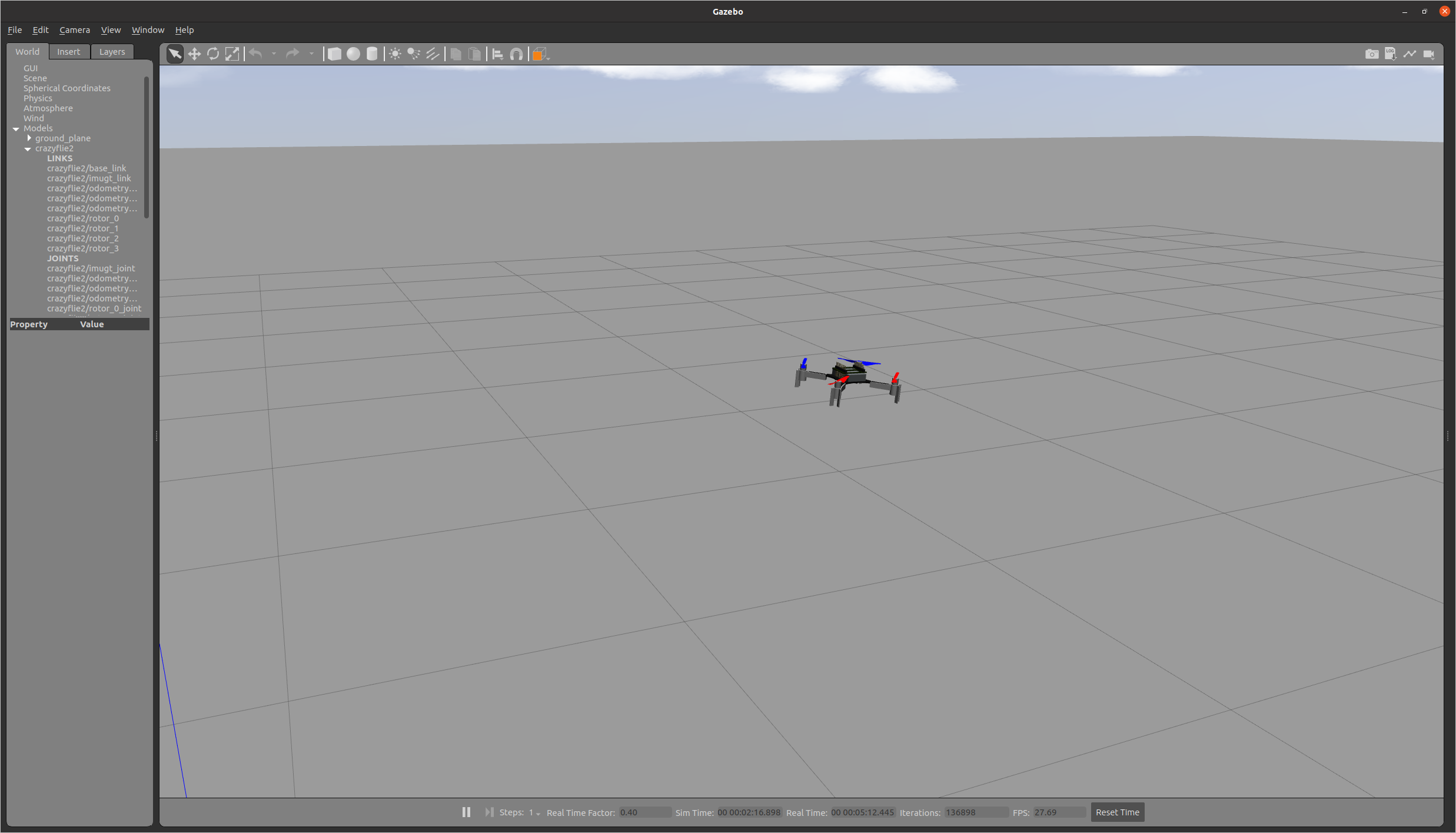

-
After getting the rotorS, I tested out the drone exercise follow_road with crazyS package in my local system & here’s how it looks:
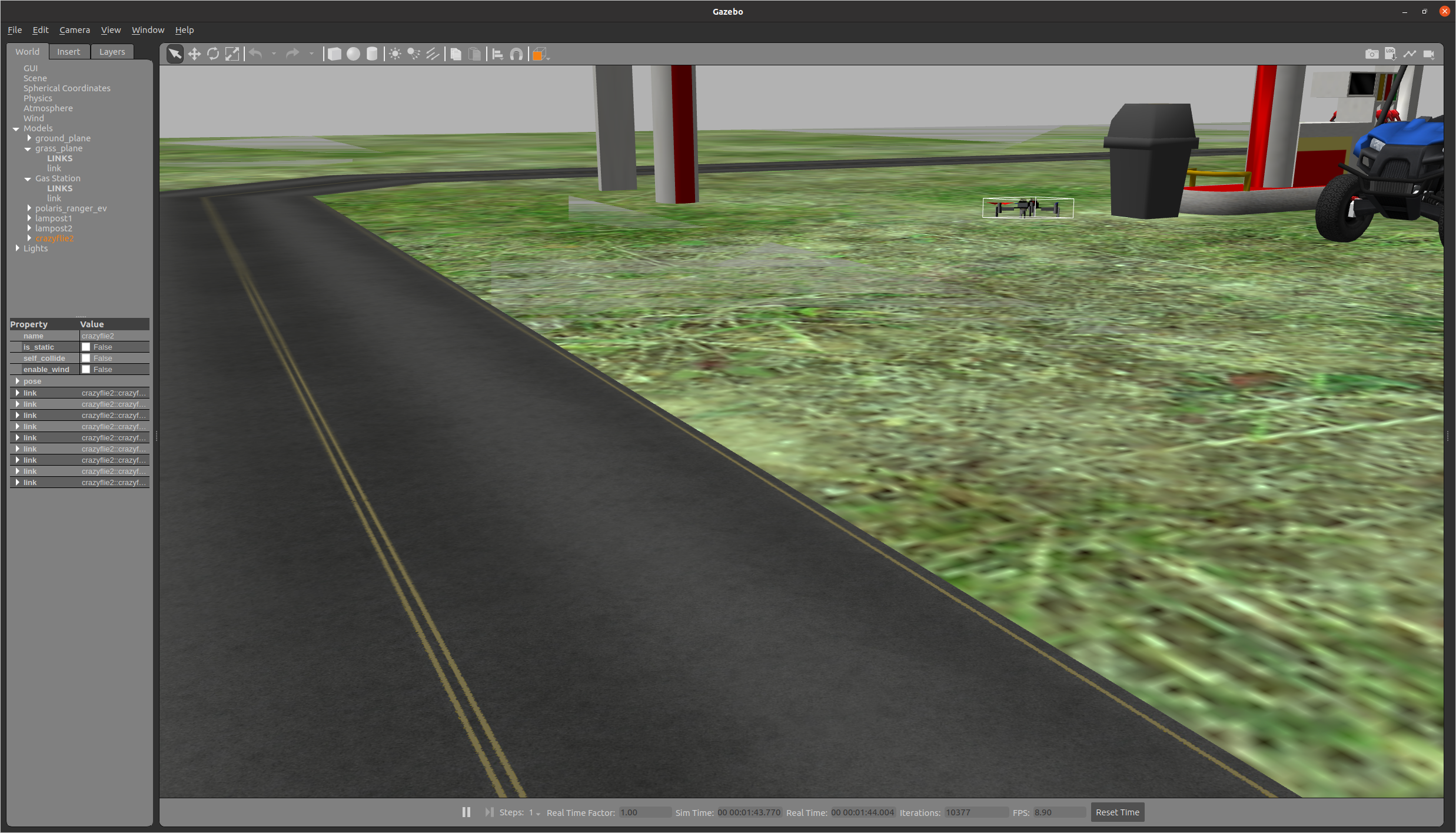
-
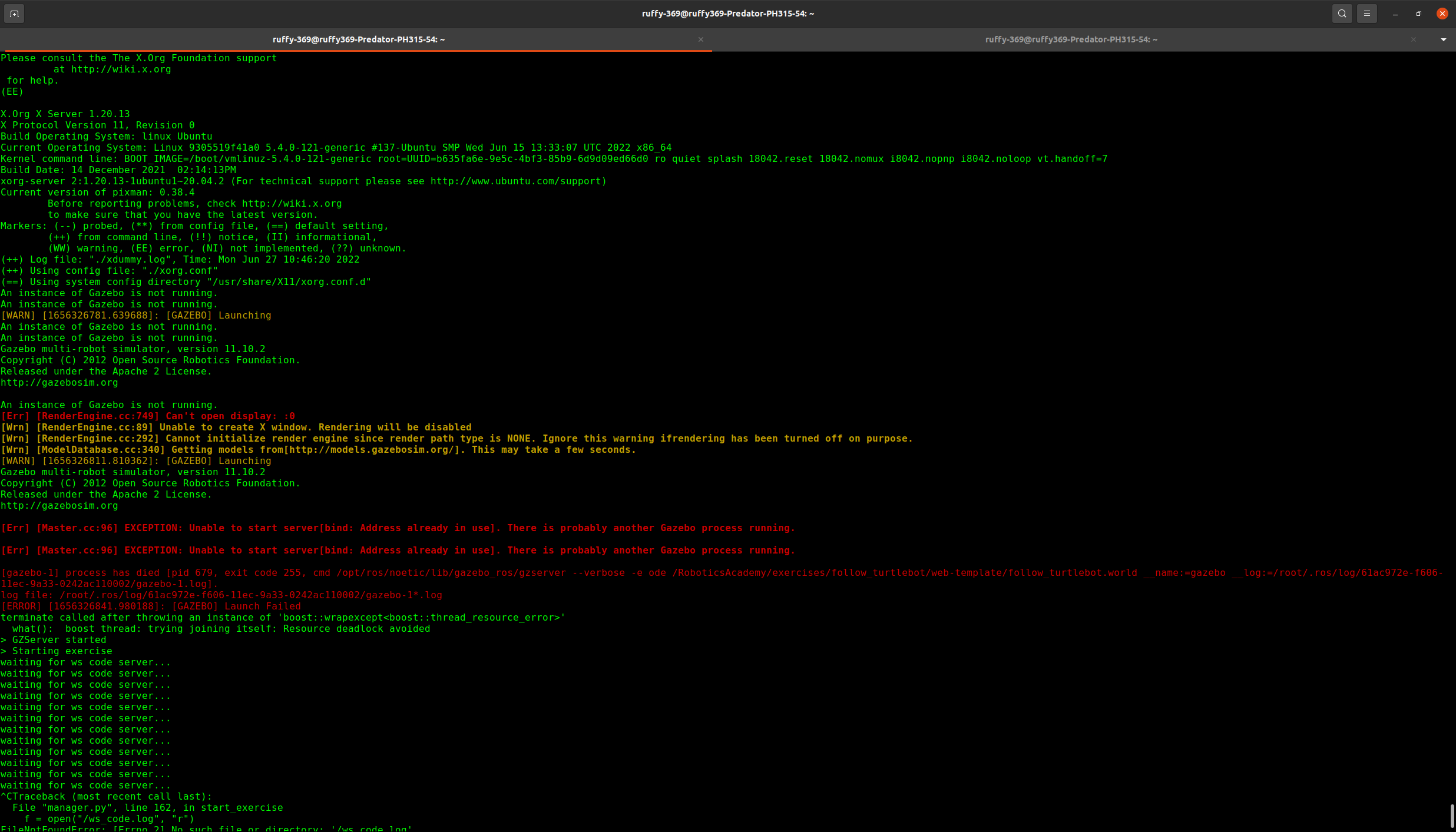
So, now came the important testing phase, i.e., testing on RADI. Here is what happened: Errors faced: gazebo not runnning: Resource not found: rotors_gazebo sol: add to GAZEBO_MODEL_PATH env variable rotors ros plugin error
- to solve building error in RADI:
catkin build -j1 - changed the aprroach:
build crazy s in docker container of RADI:
changed the exercises files to adapt crazys:
errors facing currently:
- things noticed while working with RADI:
the CrazyS package works inside RADI and rotors ros interface plugin gets loaded after launching but while putting that plugin inside the world of exercise there occurs an error for plugin load seen as down below:
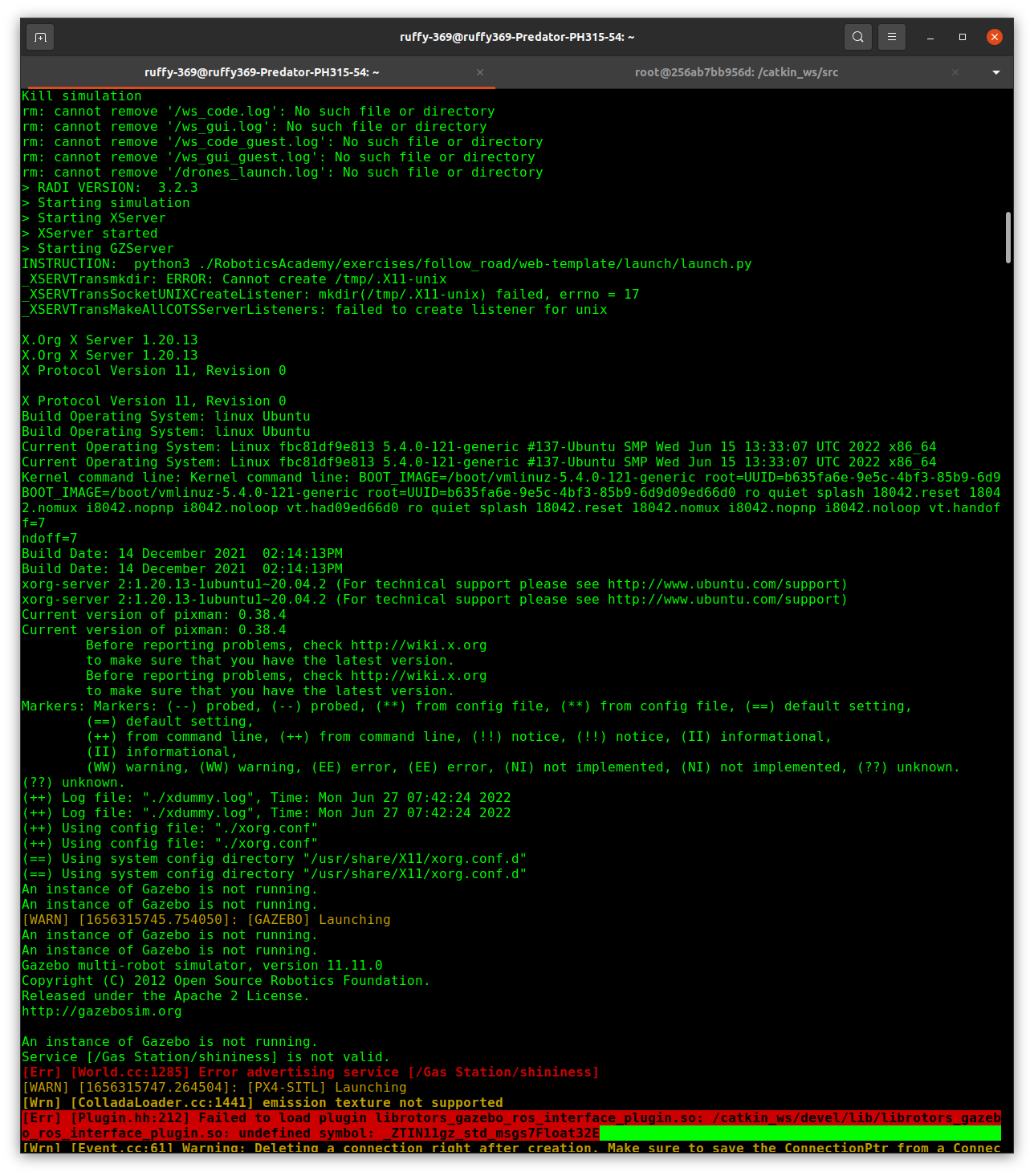
I faced this same error while building the package in my local system as well but it disappeared after rebuilding
- made a clean python script for launching in for just launching crazys example launch files, the plugin error didn’t occur: