Summary Report
Late nights, excitement and learning are how I would describe the GSoC period in a few words. These past two months have been a lot of fun, from starting off...
This was a week where I started to work on the Finite State Machine that I had mentioned in my proposal.
## FSM
The start was simple enough, first I had to find a world to run the robot in. My mentors suggessted the Vacuum Cleaner exercise from Robotics Academy or Bump and Go. I initially tried setting up Bump and Go’s world on my computer.
However it used a kobuki robot or rather a kobuki_node dependency of the bot. Despite checking multiple sources on the internet I wasn’t able to find a way to install it through the ros package manager. This left me one option i.e. to build from source, over here I followed a few tutorials but quickly realised that the errors I was getting would be quite troublesome to solve, and it would be easier to simply try the Vacuum Cleaner world once.
For the Vacuum Cleaner bot I had to download the Custom Robots repo from JdeRobot. I placed this repo in my catkin_ws and added the models to my $GAZEBO_MODEL_PATH soon after it launched perfectly.
My approach to the FSM was as follows:
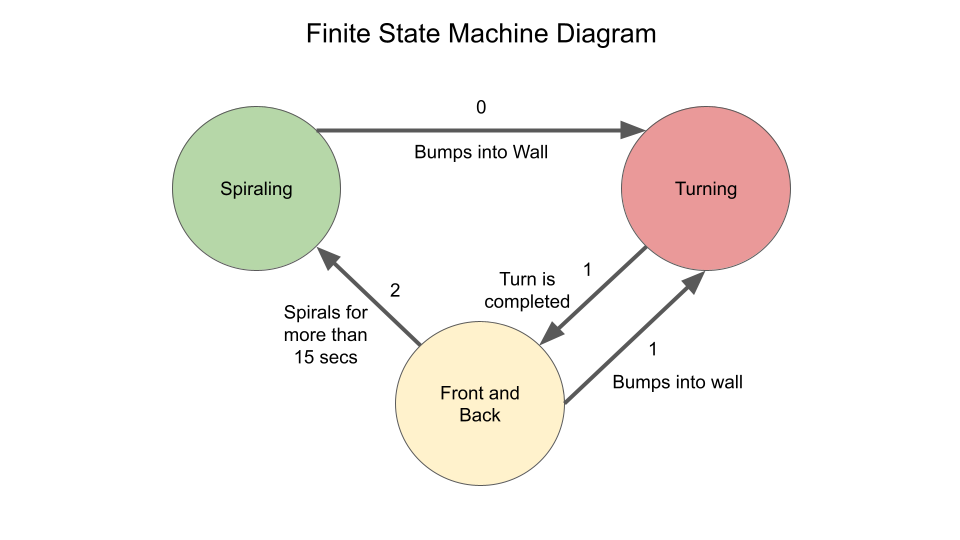
With 3 main states
I managed to create a working Python program in short order, but when it came to making something similar with Visual Circuit I started facing some issues.
A few were related to how i had initially placed the for loops and initialised nodes in my programs. After those were out of the way I faced an issue where overlapping commands were being sent to the motors.
This was because the inbuilt abstraction over the motors used threading to keep supplying values, to deal with this i wrote my own publisher to the topic, it was quite simple and resolved the issue.
Finally I had an issue where the bot could not go back to its initial state after getting to the third one.
Unfortunately I couldn’t resolve this within the week and had to push it forward as a part of next weeks goals
No new Issues were raised this week
No new Pull Requests were issued this week however some corrections and updates were made on already active ones from the previous week.
Late nights, excitement and learning are how I would describe the GSoC period in a few words. These past two months have been a lot of fun, from starting off...
Going by the suggestions of my mentors, I spent this week working on the documentation of the blocks and some updates to my blog.
This week I looked into MultiProcessing Conditions and finished the video of the FSM.
This week saw the completion of the FSM video and the solution to the block size bug.
I made more progress with the documentation and some other auxillary bug fixes this week.
Another pretty busy week for me personally. This led to a bit of slowdown in the work done. However I started with the documentation editing through Jinja an...
This week was quite hectic for me. My college started offline after a while, due to travelling and a few other events the time I could spend on Visual Circui...
This was a week where I started to work on the Finite State Machine that I had mentioned in my proposal.
This week marked a focus on completing the remaining PRs from last week. I also finished adding a new IMU block and worked on general share() and read() func...
This week I finally finished the remaining templates from last week. I also managed to upload my created videos to the JdeRobot YouTube Channel.
This week was about identifying and solving some bugs I had noticed during usage of the tool. I also started with the work template updation.
This week marked the official beginning of the coding period. Going by last week’s set goals I started on the video creation part first and foremost.
This was the last week of community bonding, however due to other commitments in college I had a hard time working on Visual Circuit.
In my previous posts I had highlighted the challenges I faced while installing Jde Drones and getting code running on it. Next after these steps was to solve...
After I got the drones running now it was time to actually write the code to solve some exercises. The goal for this week of the GSoC period was to get 1-2 a...
Getting started with my GSoC period, one of my goals during the project was to make drone applications using Visual Circuit. JdeRobot’s Academy already has s...