Coding Period - Week 11
This week, I decided to try another exercise with the most distinct pattern from the previous one. I found the anomaly using the exercise detials list. I discovered a distinct pattern in the DL Digit classifier exercise. As a result, I decided to proceed with the DL digit classifier exercise.
Goals
-
DL Digit classifier Exercise
-
Atomize the exercise control widgets
-
Categorizes the different components into sub-directories
Accomplishment and Challenges
-
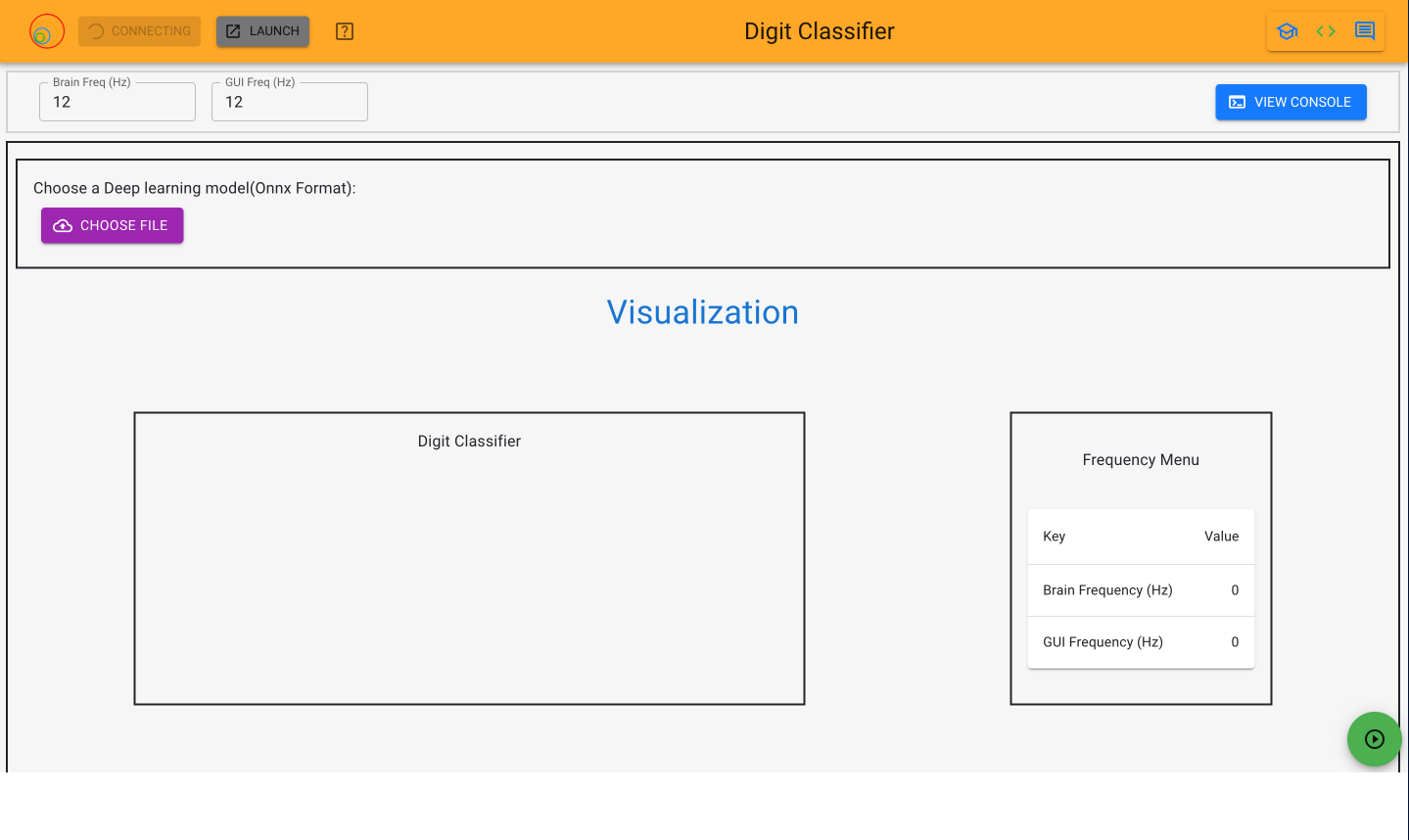
DL Digit classifier Exercise [Task 1]
Components that are different in this exercise are -
-
Exercise control widget - The noticeable difference is that the exercise control widget is not shared by all exercises. Though the widget is used in all exercises, the way it is used varies by exercise. As a result, I had to create a separate widget for each exercise. This is a good thing because it makes the exercise more modular and reusable. In the case of the DL Digit classifier exercise, I had to create a separate widget for the exercise control because it only required the PlayStop and Reset buttons. Other buttons, such as Load file, Save file, View Sim, and Load into robot, are not required for this exercise.
- File Selector - A file selector is a widget that allows you to choose a file from your local system. The Onnx format model for the exercise is loaded using this widget. To make the widget more modular and reusable, the context, file ref, file type, file extension, file name, and callback function are passed to it. The callback function is used to send the file that was selected to the parent component.
- Gazebo - There is no gazebo required for this exercise hence the Gazebo widget is not required for this exercise.
-
Atomize the exercise control widgets [Task 2]
As Observed in the previous exercise, the exercise control widget is not common for every exercise. It is a separate widget that is used to control the exercise. Though Every exercise utilize this widget, the way it is used is different in every exercise. The common pattern for exercise control are -
- Exercise Control [ FULL FUNCTIONALITIES ] - It consists of functionalities like PlayStop, Reset, Load file, Save file, load into robot, gui frequency slider, brain frequency slider, view Sim, view Gazebo and teleop.
- Exercise Control [ No TeleOp ] - It consists of functionalities like PlayStop, Reset, Load file, Save file, load into robot, gui frequency slider, brain frequency slider, view Sim and view Gazebo.
So for this approach I created all buttons as separate widget considering the scope of future changes.
This is a good thing as it will help in making the exercise more modular and reusable.
-
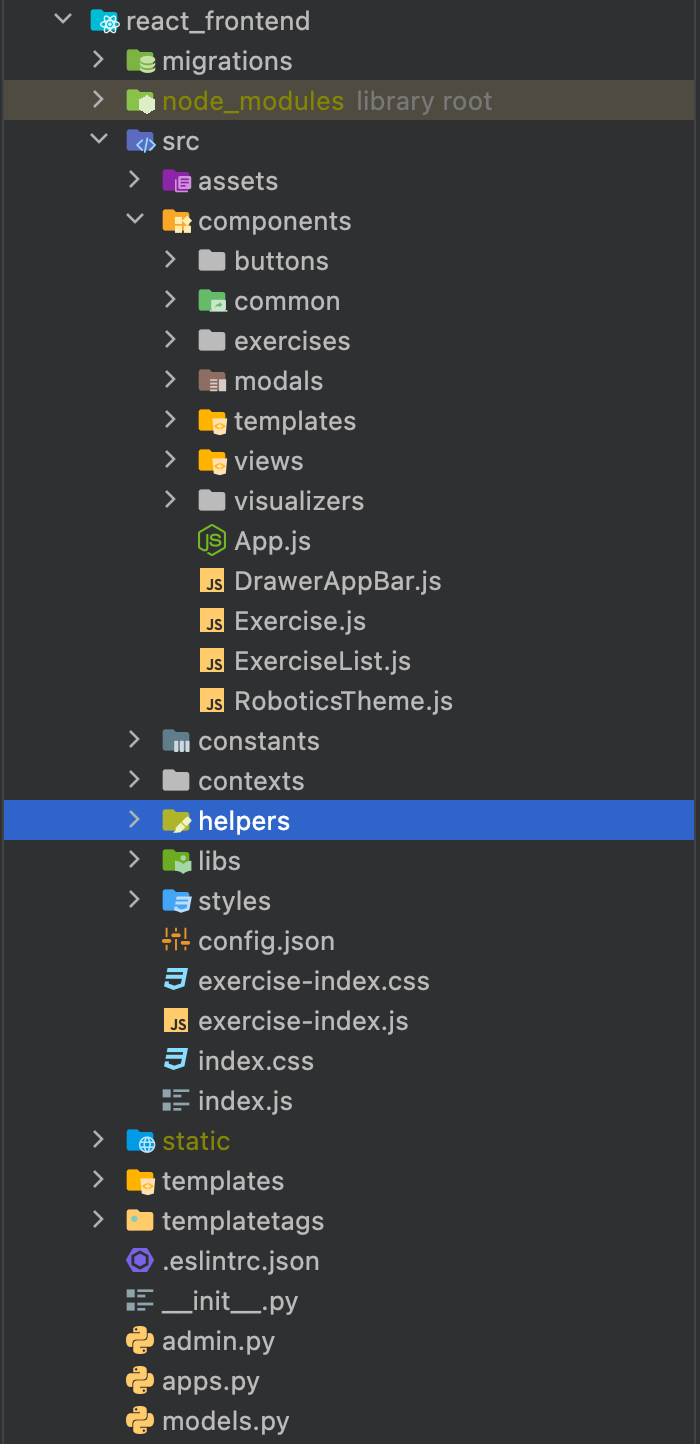
Categorizes the different components into sub-directories [Task 3]
After migrating several exercises there were many components clubbed together in a single folder which may cause hindrance to the exercise developer in making the exercise.
Considering the future prospect of the project, I built the components but a structural representation will make the process more subtle and fast.
Components were divided into the categories written below -
- Views - different views for exercises and also consisting of forum and theory view,
- Modals - Load modal, Info modal and Error Modal,
- Common - components common for every exercise,
- exercise - components that specific to the exercise,
- buttons - buttons that are utilize in an exercise,
- visualizers - different visualizers were created for differnt exercise and
- templates - Main Body of the exercises that are rendered by the Django server.
NOTE: As explained in previous weeks, exercise was broken down into three views - exercise, theory and forum. So all different views were stored in the views folder
Issues and Pull Requests
-
Issues
-
Pull Request
Achievements
🎉🎊🙌🏻 DL Digit classifier Exercise Completely migrated and working perfectly. 🎉🎊🙌🏻